超高速攝影機電控系統設計

邏輯電路XC95288的功能設計
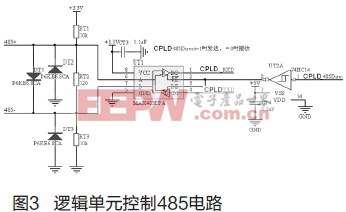
本文引用地址:http://www.104case.com/article/164397.htmXC95288是Xilinx公司的在系統可編程CPLD器件,主要用來完成邏輯控制和轉鏡速度測量等功能,其控制的內容包括轉鏡速度和外部同步信號的讀取、控制機械快門、脈沖氙燈以及觸發目標,同時也控制MAX485等芯片實現與上位控制計算機的半雙工通信。
XC95288與MAX485的連接電路如圖3所示。
超高速攝影機需要將轉鏡加速到預定的拍攝速度,并能夠維持數秒(維持時間不宜過長,否則將損壞電機),以等待拍攝目標的到來。因此要設定拍攝速度的自動選擇環節,當轉鏡速度達到預定的轉速時,它能自動給出信號以穩定電機轉速。當攝影頻率為500萬幀/秒=5×106fps時,拍攝320個畫幅對應轉鏡的旋轉角度為120°,此時轉鏡轉速n為:n=(120/360)fω/N=(1/3)×5×106/320=5208.33rps=312500.0rpm。
為了測量電機轉速是否達到設定的轉動速度,這里設計一個速度測量電路,其參數如下:(a)頻率測量范圍:10Hz~1MHz;(b)測量分辨率:1Hz;(c)測量通道靈敏度:50mVpp;(d)通道輸入阻抗:≥100kΩ。
(1)電機信號整形電路
電機轉速輸入的速度頻率信號是方波,并且信號的測量通道靈敏度為50mVpp,為此需要將速度信號放大整形成標準的TTL電平的方波信號,便于XC95288對信號脈沖的計數,放大電路需要將最小為Vpp=50mV的信號經過放大整形后變成Vpp=5V電平,并且前向通道電阻≥100kΩ,則放大電路的電壓放大倍數為:
輸入電阻Ri≥100kΩ,并且工作頻率要求為10Hz~1MHz,由上述要求選用了AD8014,其3dB帶寬為140MHz,符合放大要求,而整形電路采用施密特觸發器74HC14。具體電路如圖4所示。

第一級射級跟隨器提高了輸入阻抗,使其滿足Ri≥100kΩ的要求,使得信號基本上送入后級,再經過兩級的放大使信號放大,最后經施密特觸發器整形成比較好的方波信號,為后面的處理提供信號。
(2)電機速度頻率測量電路
XC95288主要實現對被測信號的脈沖個數進行處理,并通過串口發送到PC上進行實時顯示。這里采用有源晶振40MHz進行分頻得到計時標準時鐘,標準時鐘為電機速度頻率測量提供精度相對較高的時基信號,其時間的穩定性和精度將會直接影響到測量的準確性。
用XC95288實現電機速度測量的電路結構如圖5所示。













評論