基于RFID傳感器網絡的目標跟蹤問題研究

RFID技術和WSN技術具有不同的技術特點,WSN可以監測四面八方感應到的各種信息,但對物品的標識能力卻有所缺乏,RFID技術強大的標識物品的能力正好可以彌補;RFID抗干擾性較差,而且無源RFID的有效讀取距離一般小于10m,如果能利用WSN長達100M的有效距離,將會拓展RFID技術的應用范圍。將RFID和WSN進行集成應用,會極大地推動兩項技術的應用。 目前國內外對RFID與WSN的集成技術研究,主要集中在集成傳感器的RFID標簽、集成的體系架構、以及集成的應用開發等方面。但是,對于將RFID讀寫器集成到傳感器網絡中體系架構的研究目前還只是抽象的架構設計。
RFID 的一個發展趨勢是與網絡集成,目前RFID網絡已經開始逐步走向成熟。將傳感器節點集成到RFID系統中可以獲取更多所需的環境信息,并且可以擴大RFID系統的識別范圍。因此我們設計RFID傳感器網絡,網絡結構如圖3所示。
我們可以利用這一RFID傳感器網絡對移動的目標進行跟蹤定位研究。這一網絡擁有大量的傳感器節點和RFID讀寫器,傳感器節點可以用來精確的監控移動目標的周圍環境,同時RFID讀寫器可以用來確定目標的移動軌跡,并防止目標進入限制區域。
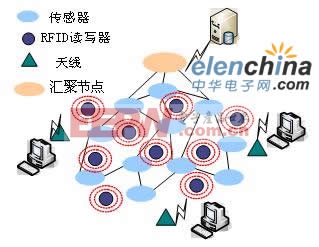
圖3 RFID傳感器網絡體系結構
3 目標跟蹤系統
移動目標的跟蹤定位是最近在供應鏈領域新涌現出的一個研究內容。目前在這一問題中,WSN應用的比較廣泛。
典型的RFID系統,只能提供有限范圍內的單品目標跟蹤。例如在倉儲管理中,通常是在安全區域的大門進出口處安裝RFID讀寫器設備,經過此處的物品可同時一次性進行識別驗證。所有安裝了標簽的托盤或者物品就在這一刻被確定了當前的位置。
由于傳感器節點體積小、價格低廉、采用無線通信方式,以及傳感器網絡部署隨機,具有自組織性、魯棒性和隱藏性等特點,無線傳感器網絡非常適合于移動目標的定位和跟蹤。但是傳感器節點存在很多硬件資源的限制,還經常遭受外界環境的影響,無線鏈路受到干擾,網絡拓撲結構動態變化,而傳感器網絡的移動目標跟蹤應用具有很強的實時性,因此引入了RFID讀寫器的傳感器網絡,可以更好的解決這一問題。
現代的目標跟蹤問題中常常關注著目標移動的曲線,并且伴隨著大量的監控信息,例如周圍環境的溫度,濕度等等。在RFID傳感器網絡中,RFID讀寫器負責探測并確定當前移動目標的位置,以及移動的方向,傳感器負責搜集目標周圍的其他相關信息,并在適當的時候做出報警。
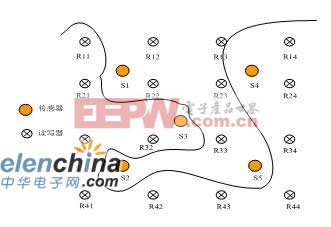
圖4 RFID傳感器網絡中目標跟蹤軌跡
4 實驗
在我們的實驗中,假設目標的移動軌跡為一條曲線,如圖4所示。我們設定一個由16個RFID讀寫器組成的4 4正方形跟蹤區域,由圖中虛心圓點標識。實心圓點代表傳感器。
當一個攜帶標簽的移動目標如圖中所示由 移動到 ,兩點之間的直線被認為是目標移動的軌跡。因此,當目標沿著圖中的曲線運動時,由相應的RFID讀寫器確定其位置,相應順序激活的RFID讀寫器為:
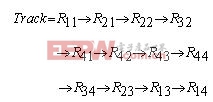
在目標的移動過程中,如果接近其中一個傳感器,該傳感器就會搜集該目標周圍環境的相關信息,例如溫度、濕度,并且將這些信息通過RFID傳感器網絡及時傳送給計算機管理系統。圖中傳感器的作用順序為:
![]()
5 結論
在這篇文章中,我們提出了一個將RFID讀寫器與無線傳感器網絡相結合的RFID傳感器網絡架構,這一架構可以擴大系統的覆蓋范圍并擴展RFID信息系統的信息種類。我們初步將這一架構應用在移動目標的跟蹤定位上,理論上取得一定的進展。未來的研究重點放在這一框架在供應鏈系統中的實際應用。












評論