基于IP傳感器的信息載體安全終止系統的研究

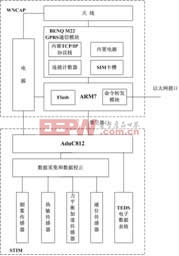
3.2 WNCAP
WNCAP模塊是連接STIM模塊與GPRS網絡的接口,主要包括ARM7嵌入式系統,BENQ-M22 GPRS無線通信模塊以及電源,天線等輔助模塊。
GPRS無線通信模塊中嵌入了TCP/IP協議棧,由于模塊資源的限制,需對TCP/IP協議進行裁剪,只保留滿足功能的基本協議。ARM7通過AT撥號命令接入GPRS網絡,并向指定的中心數據網關IP發起TCP/IP連接,實現Internet/Intranet的無線接入。若連接GPRS網絡失敗,模塊會進行自動重連,且連接計數器自動加1,當計數器的值超過一定值時,即向命令轉發模塊發送數據銷毀命令并轉發給相連的設備。
ARM7中的Flash存儲器用來存放網絡配置參數。為方便對IP傳感器進行管理和維護,Flash中還存放有IP傳感器的Web頁面并創建了動態Web Server。這樣工作人員可在監控計算機上通過瀏覽器遠程訪問IP傳感器中的Web頁面,實現遠程訪問、配置、診斷和維護等功能。ARM7中還包括命令轉發模塊,負責將監控計算機的數據銷毀命令轉發給被控計算機。
3.3 STIM
STIM模塊以AduC812[7]為MCU,接入了4個傳感器:煙霧傳感器,熱敏傳感器,力平衡加速傳感器和液位傳感器。
煙霧傳感器對煙霧的感應主要由光學迷宮完成,迷宮內有一組紅外發射,接收對管,對射角度約120度。當無煙霧時,接收管接收不到紅外發射管的紅外光,后續電路無電壓輸出;當有煙霧時,煙霧進入迷宮使紅外管發射的紅外光發生散射,散射的紅外光被接收管接收,在后續電路產生電壓輸出,煙霧越大,則散射越強,產生的電壓也越高。
熱敏傳感器的工作原理基于熱電效應,將兩種不同材料的導體或半導體焊接起來,構成一個閉合回路。當兩個導體的執行點之間存在溫差時,兩者之間便產生電動勢,在回路中形成一個電流,熱敏傳感器就是利用這一效應來工作的。
差容式力平衡加速度傳感器把被測的加速度轉換為電容器的電容量變化。傳感器的機械部分緊靠電路板,把加速度的變化轉變為電容中間極的位移變化,后續電路通過對位移的檢測,輸出一個對應的電壓值,由此可以求得加速度值。
液位傳感器采用紅外光電原理,當外界液體接觸到傳感器表面時,改變了光線路徑,紅外接收管處于截止狀態,從而觸發反向器翻轉,輸出呈低電平吸收電流狀態。
從以上四種傳感器采集煙霧濃度、溫度、震動加速度和液位等參數信息。數據校正引擎利用特定的數學函數對各個傳感器通道數據應用存儲的多項式系數為通道校正出精確的數據。
監控計算機利用經過采集和校正后的數據判斷與某IP傳感器相連的被控計算機或儀器是否有緊急情況發生,例如通過力平衡加速傳感器參數信息可分析出被控計算機或儀器所處環境是否有地震發生。一旦分析得出有緊急情況發生,監控計算機即下達數據銷毀命令。
TEDS是STIM內部的一個可升級、可擴展的電子數據表格,存儲在EEPROM中,它負責描述STIM自身以及與之相連接的傳感器的屬性,存儲了諸如傳感器名稱、辨識數字、設備類型、序列號、校驗數據等信息。
4、數據銷毀模塊的實現
數據銷毀模塊內嵌在被控計算機或儀器中,包括網絡通信和軟件覆寫數據銷毀兩個子模塊。其流程圖如圖3所示。

圖3 數據銷毀模塊流程圖

tcp/ip相關文章:tcp/ip是什么










評論