基于DSP+CPLD的伺服控制卡的設計

已知一位置伺服系統的數學模型系統的開環傳遞函數z變換后的表達式為:本文引用地址:http://www.104case.com/article/163843.htm
采用的單神經元PID及CMAC相結合的復合控制算法,完成對位置伺服控制器典型輸入斜坡輸入響應的仿真實驗。
圖3和圖4分別是位置伺服系統的單位斜坡輸入響應曲線圖,通過對圖形的分析,可以看出,單神經元PID與CMAC相結合控制算法比常規PID控制算法有更小的跟隨誤差,直接決定該控制系統的控制精度。圖4是在輸出端加入lO%的階躍擾動后,兩種控制算法的輸出曲線圖,由圖可知單神經元PID與CMAC相結合控制算法比常規PID控制算法有更好的抗干擾能力。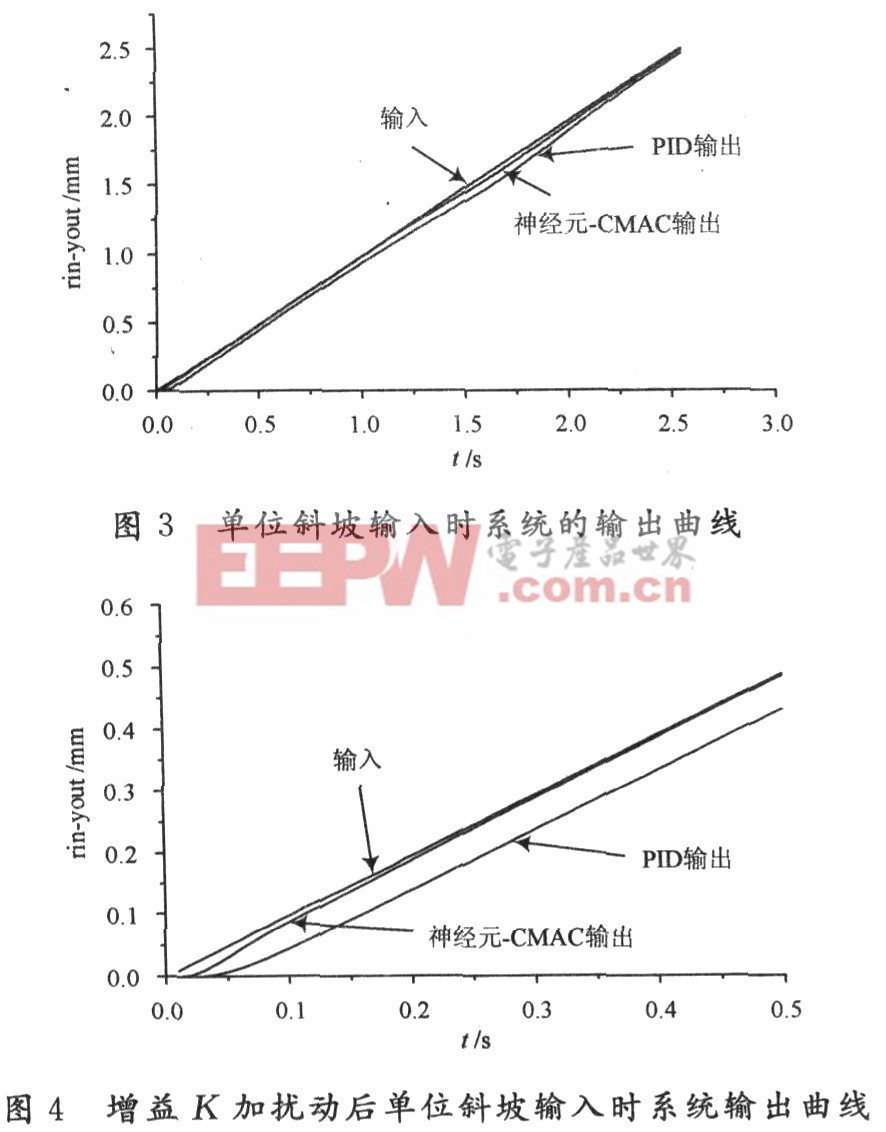
3 結 語
針對位置伺服控制系統的特點,設計了一種基于神經網絡控制算法的伺服運動控制卡,將單神經元PID與CMAC并行控制的伺服控制算法應用在位置伺服系統的位置環控制。仿真結果證明了該控制算法較常規PID控制有更好的動態特性、控制精度、抗干擾能力,而且具有自適應功能。

伺服電機相關文章:伺服電機工作原理











評論