基于DSP+CPLD的伺服控制卡的設計

2 控制算法的設計
2.1 控制模型
在運動控制伺服系統中,需要控制的系統參數主要有位置、速度、加速度、輸出扭矩/力矩等。傳統的位置伺服控制策略是以PID控制為代表,但需依靠精確的數學模型,系統模型參數的變化及非線性因素等都會對常規PID的精確調節產生影響,因而PID對非精確、非線性對象的控制往往難以取得很好的控制效果。
CMAC神經網絡具有處理非線性和自學習的特點,而且該控制網絡的學習速度快。目前在工業中關于CMAC控制器的結構大都采用常規PD和CMAC并行的控制結構,它在階躍輸入或跟蹤方波信號時,具有輸出誤差小,魯棒性強等特點,然而在跟蹤連續變化信號時,卻容易產生過學習現象,進而導致系統的不穩定。為此,設計一種單神經元PID與CMAC復合控制的控制算法,用單神經元PID替代常規PID控制,由神經元來在線調整PID控制參數,利用神經網絡的自學習和自適應能力,來改善系統的跟隨性能。該算法的構成簡單,易于實現,能夠適應環境的變化,有較強的魯棒性。仿真結果證明該算法具有較小的跟隨誤差,良好的魯棒性和抗干擾能力,其結構圖如圖2所示。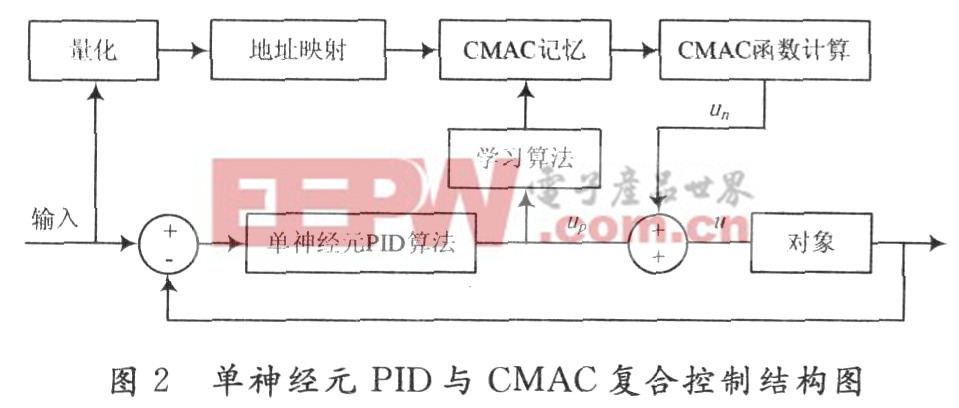
2.2 并行控制算法的設計
由圖2綜合單神經元PID與CMAC控制算法,得到單神經元PID與CMAC并行控制完整的控制算法如下:

其中:η,ξ為網絡學習速率;α為慣性系數。
2.3 算法的實現、仿真和結果分析

伺服電機相關文章:伺服電機工作原理











評論