步進(jìn)電機(jī)加減速控制器的設(shè)計(jì)

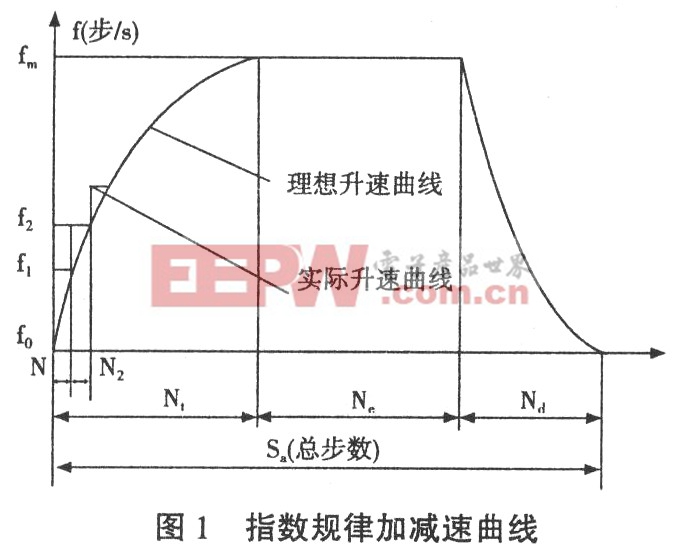
步進(jìn)電機(jī)的升速過程可按以下步驟進(jìn)行處理。
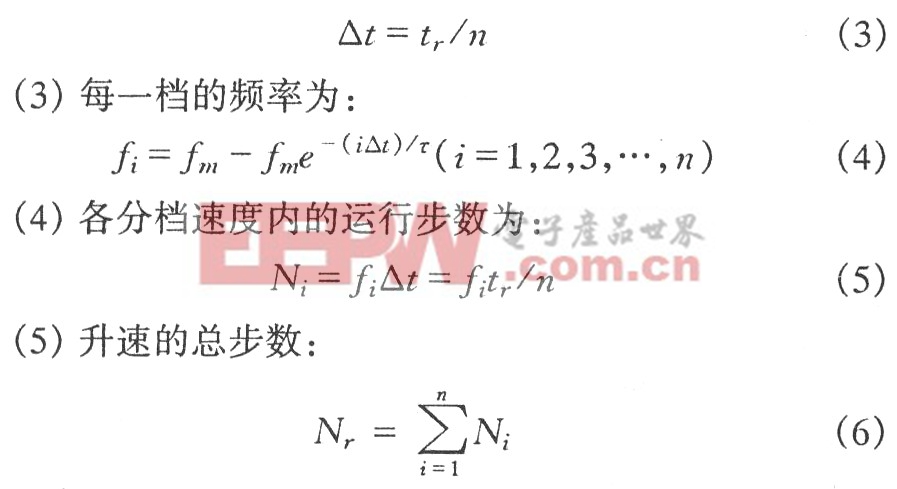
(1)若實(shí)際運(yùn)行速度為fg,從(3.4)式中可算出升速時(shí)間為:
![]()
(2)將升速段均勻地離散為n段即為階梯升速的分檔數(shù),上升時(shí)間為tr,則每檔速度保持時(shí)間為:
程序執(zhí)行過程中,對每檔速度都要計(jì)算在這檔速度應(yīng)走的步數(shù),然后以遞減方式檢查,即每走一步,每檔步數(shù)減1。當(dāng)減至零時(shí),表示該檔速度應(yīng)走的步數(shù)己走完,應(yīng)進(jìn)入下一檔速度。一直循環(huán)到給出的速度大于或等于給定的速度為止。減速過程與升速過程剛好相反。
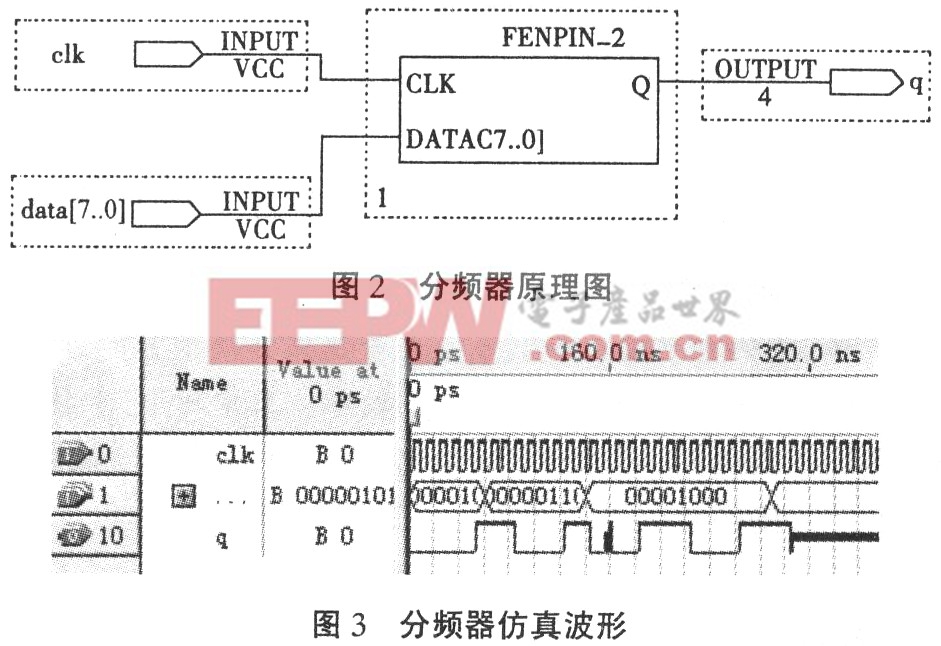
2 頻率脈沖的實(shí)現(xiàn)
頻率脈沖模塊的核心是可控分頻器,由外部的晶振產(chǎn)生標(biāo)準(zhǔn)頻率,只要在分頻器的輸入端輸入相應(yīng)的分頻系數(shù),就可以得到所需的頻率。本模塊是利用VHDL硬件描述語言,通過QuartusII開發(fā)平臺(tái),使用Altera公司的FPGA,設(shè)計(jì)了一種能夠滿足上述各種要求的較為通用的可控分頻器。圖2為分頻器的原理圖,圖3為分頻器的仿真波形圖。
3 結(jié)語
基于硬件描述語言VHDL設(shè)計(jì)的控制器具有開發(fā)設(shè)計(jì)周期短、風(fēng)險(xiǎn)低、系統(tǒng)集成度高、功耗低等優(yōu)點(diǎn),將是芯片設(shè)計(jì)的主流方向。開放式數(shù)控系統(tǒng)中,研究實(shí)現(xiàn)能硬件復(fù)用的加減速模塊以及相關(guān)功能模塊,利用可編程邏輯器件FPGA的可重構(gòu)能力,能按需求靈活實(shí)現(xiàn)功能全定制的運(yùn)動(dòng)控制芯片。本文設(shè)計(jì)了自動(dòng)磨邊機(jī)中的指數(shù)加減速控制器。在此基礎(chǔ)上,只需擴(kuò)展相應(yīng)個(gè)數(shù)的加減速模塊即可實(shí)現(xiàn)多軸聯(lián)動(dòng)加減速控制。











評論