基于PLC的三自由度機械手控制系統設計與實現

機械手在最上面、最右邊,底盤轉至光接近開關X3處且夾緊裝置松開時稱系統處于原點狀態。X10為手動控制按鈕,按下該按鈕后,可以進行按鍵開關X20~X27對應的手動操作。X11~X15分別為自動方式中的回原點、單步、單周期和連續工作方式按鈕,按下其中的某一個按鈕,再按起動按鈕X0,該工作方式的動作就會自動執行。步進電機只有在有脈沖信號(Y0)和方向信號(Y2或Y3)輸入時才會轉動,Y6,Y7選擇將脈沖信號Y0送至哪個步進電機。Y5控制送氣電磁閥,實現夾緊裝置的夾緊與松開。Y10,Y11控制底盤直流電機的正反轉。
2.2 軟件設計
在選擇單步、單周期和連續工作方式前,系統應當處于原點狀態。如果不滿足這一條件,可以選擇回原點工作方式,該工作方式依次執行以下操作:向上運動至上限位x1→向右運動至右限位X2→順時針轉動至光接近開關X3→夾緊裝置松開。
機械手自動工作方式的順序功能圖如圖3所示。機械手手臂的運動速度由輸入步進電機的脈沖頻率控制,機械手下降及左行的距離由脈沖數控制,脈沖頻率和脈沖數可以根據工業現場的實際情況在程序中設定,具有可重復操作性。
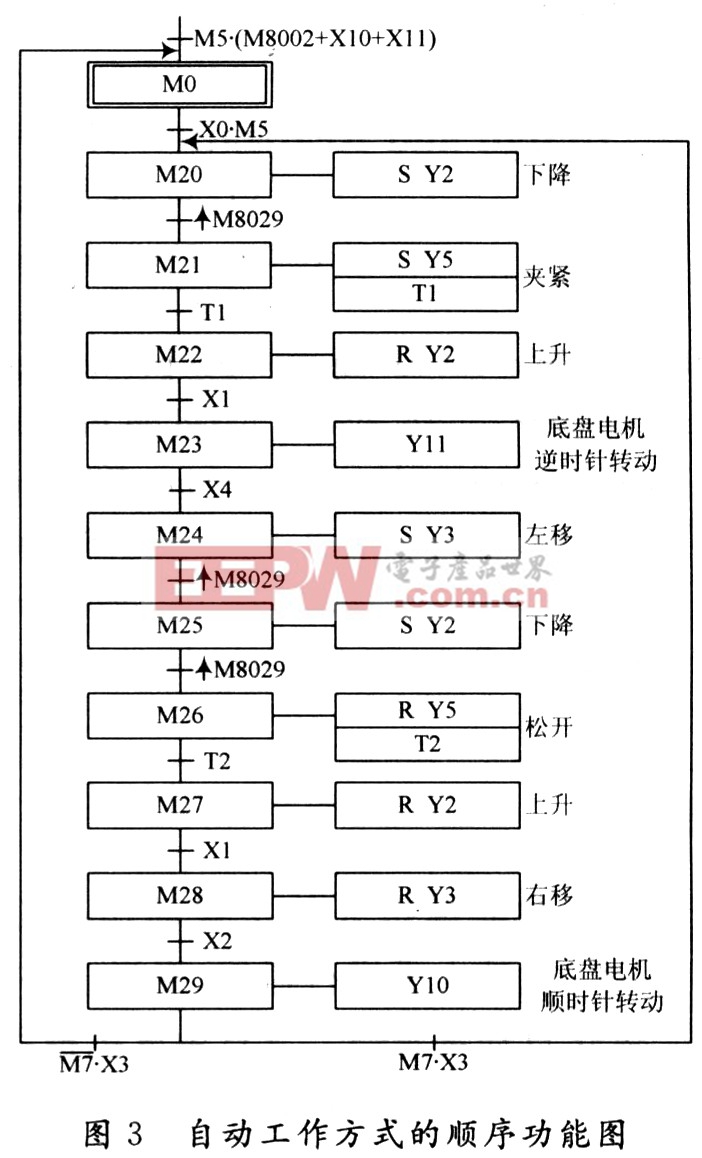
本系統采用的是PLC梯形圖順序編程的方法。其中以PLSY脈沖輸出指令輸出脈沖,用MOV指令設定脈沖個數,指定脈沖輸出完后,指令執行完成標志M8029置1。由于PLSY指令只能使用一次,而系統中兩個步進電機均需要脈沖輸入,設計中采用兩個外部繼電器解決了該問題。將Y0輸出的脈沖同時接至兩個繼電器動觸點,兩繼電器的常開觸點分別與兩塊步進電機驅動器的脈沖輸入端相連,Y6,Y7接到兩繼電器的控制端,這樣就可以通過Y6,Y7來控制步進電機的脈沖輸入。
3 系統的MCGS組態環境
MCGS是為工業過程控制和實時監測領域服務的通用計算機系統軟件,具有功能完善,操作簡便,可視性好,可維護性強的突出特點。圖4為三自由度機械手系統工作時的MCGS組態環境界面,它包括主界面、手動工作方式界面和自動工作方式界面。

4 結 語
經調試,步進電機的運轉無抖動和失步現象發生,機械手系統處于良好的運行狀態。三自由度機械手系統實現的只是三個自由度方向上的運動,根據工業生產的實際需要,可以對其進一步改進,在夾緊裝置肘部添加腕回轉控制裝置,就能使之成為四自由度機械手控制系統。在條件允許的情況下,也可以采用觸摸屏代替MCGS組態環境對機械手系統進行控制,這樣占用空間小,人機交互界面直觀,操作更方便。

pid控制器相關文章:pid控制器原理
電容式接近開關相關文章:電容式接近開關原理








評論