PMAC控制下的高精度轉臺雙閉環伺服系統設計與調試

PMACⅡ型卡提供了編碼器譯碼方式可以是內部脈沖+方向,其譯碼器輸出的脈沖+方向信號是由n 通道中的脈沖頻率調節器(PFM)輸出電路產生的。它可以產生一個假想的閉環來驅動開環步進系統。我們分析如果將轉臺的編碼器譯碼方式設置為內部脈沖+方向,其譯碼輸出由內部脈沖頻率調節器(PFM)輸出電路產生,這樣可以避免一些PMAC 與驅動器間的不匹配。在將I7240 設置為8(內部脈沖+方向)后,我們將轉臺閉環后,來回漂動現象消除了,用“j=10000”運行(手動走到絕對位置為10000counts 處)后編碼器反饋顯示為10000counts,沒有了抖動,并且在設置為內部脈沖+方向后,根據運行結果看,其編碼器反饋進入PMAC 后也進行了四倍頻,分辨率達到2621440 脈沖數/轉。到此,該故障得以排除。
2.3 PID 調節
在系統中,為了獲得良好的穩態特性和動態特性,需要對系統的控制環進行校正和調整,所以當系統的基本特性(包括機械傳動、電機選型等)確立后,就需要對系統的控制環進行調整了。在以PMAC 為核心控制器的系統中,通過調節它提供的PID+速度/加速度前饋調節器的參數能解決大部分的系統特性問題,這些參數包括比例增益(proportional)、積分增益(integral)、微分增益(differential)(即PID 控制);速度、加速度前饋(feedforward);摩擦增益等等。典型PID 伺服環,如圖2 所示。
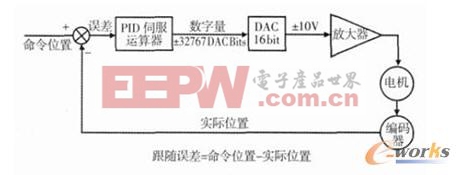
圖2 典型PID伺服環
Pewin32 提供了兩種信號源(脈沖和正弦波信號)進行PID調整,脈沖響應過程主要是用來調整系統的P、I、D 等參數,而正弦波響應主要是用來調整系統的動態特性。PID 調整過程首先將所有運行的運動程序和PLC 程序停止,然后下載自己一段小程序,讓電機轉動,實時采集數據,繪制出脈沖或正弦響應曲線,讓用戶通過響應曲線來判斷系統的特性。
PID 調整必須在了解各參數的具體作用,并不斷的實驗,最好是先作脈沖響應調整,主要調整比例、積分、微分增益,在脈沖響應曲線調整最好的狀態下,不要更改比例、積分、微分增益,作正弦響應調整,正弦響應調整主要調整速度、加速度前饋和摩擦增益等參數,以下對轉臺空載的PID 進行調整,在經多次調整后我們得出了各參數的最優化設定值。各參數意義及設定值,如表1 所示。
表1 PID調節參數意義及設定值
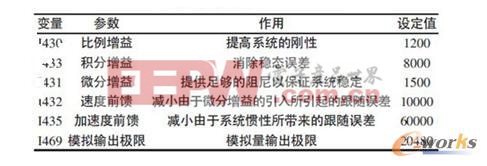
在該參數下,得出脈沖響應和正弦響應曲線,如圖3 所示。從圖中可以看出,脈沖響應曲線中,命令位置和實際位置基本重合,正弦響應曲線中指令速度曲線和時間速度曲線已經完全重合,速度跟隨誤差很下,幅值只有±4 個脈沖。在該種調試狀態下,我們用數控程序運行轉臺時其跟隨誤差只有1 個脈沖計數,相當在圓周上0.5s 角度的誤差,其動態響應已經相當快了。
圖3 PID調整曲線
3 結 論
對轉臺的調試過程中,一般會遇到許多的問題,總結起來在調試時應注意:
(1)硬件連線:仔細檢查驅動器與轉臺、驅動器與控制卡之間的連接,編碼器反饋的連接。
(2)環境干擾:外界溫度、振動、電磁干擾都可能影響到系統的精度與動態特性,調試時應有良好的環境。
(3)PMAC 參數的設置:對于PMAC 卡,由于其型號較多,不同的型號參數設置不太一樣,調試過程中需要仔細研究其參數的設置。
(4)PID 調節:PID 調節直接影響到系統特性,PID 參數調節要根據各參數的特點,不斷的實驗,找到一個最佳的參數配置。








評論