CAN總線在液壓支架電液控制系統的應用

液壓支架電液控制系統是實現綜采工作面高產高效的關鍵技術設備。當前國際上主流的液壓支架電液控制系統有:DBT公司的PM4、MARCO公司的PM31和JOY公司的RS20型3種。在通訊方面,PM4架間通過BIDIBus互聯成綜采面網絡。這種方式的缺點在于,一旦控制器不能正常工作,將導致控制系統通訊的中斷。PM31架間的通訊通過BIDIBus,全工作面的互聯則采用TBus。RS20控制器間通過一條19芯強電纜連接,其中的8根線用于通訊和緊急閉鎖。可以看出,PM4與PM31都采用總線的方式進行通訊,但都不是標準的現場總線。通過對3種控制器的剖析發現,它們的技術思路形成較早,且產品一直延續著早期形成的思路。而現場總線的提出相對較晚。與現場總線方式相比,早期的技術思路存在著如下幾點缺陷:實現復雜,需要消耗較多的系統資源;沒有提供可靠高效的通訊協議,數據的錯誤檢測和出錯重發完全靠用戶編制的軟件實現,網絡的錯誤處理能力不強。為了保證通訊的準確性和系統運行的可靠性,就必須編制完善的調度程序和通信協議,這就增加了系統開發的難度和開發周期。采用現場總線技術則可較好的解決上述問題。
CAN(ControllerAreaNetwork)即控制器局域網絡,是一種標準的現場總線。由于其高可靠性、靈活性以及獨特的設計,CAN總線越來越受到人們的重視并被廣泛的應用于航海、航空、醫療及工業現場領域。CAN總線的特點可以概括如下:
(1)通信方式靈活。CAN既可以采用多主方式,也可以采用單主多從的方式。
(2)CAN總線采用非破壞性仲裁技術,當多個節點同時向總線發送信息時,優先級較低的節點會主動的退出發送,而最高優先級的節點可不受影響的繼續傳輸數據,從而大大節省了總線沖突仲裁時間。
(3)通過報文濾波即可實現點對點、點對多點及全局廣播等幾種方式傳送接收數據,無需專門的“調度”。
(4)CAN的直接通信距離最遠可達10km(傳輸速率5kb/s以下);通信速率最高可達1Mb/s(通信距離最長為40m)。
(5)CAN上的節點數主要取決于總線驅動電路,目前可達110個;報文標識符可達2032種(CAN2.0A),而擴展標準(CAN2.0B)的報文標識符幾乎不受限制。
液壓支架電液控制系統是一種分布式控制系統。而CAN總線自身的特點使CAN總線能夠有效的支持分布式控制。結合CAN總線在分布式控制系統中的成功應用以及液壓支架電液控制系統的特點,將CAN總線應用于液壓支架電液控制系統具有較大優勢。
3CAN總線節點的設計
基于CAN總線的液壓支架電液控制系統中,每個支架控制器都是一個CAN節點,采用總線式拓撲結構,如圖1所示。由于CAN總線驅動器最多支持110個CAN節點,當綜采面的支架數超過該數目時,還需配備CAN總線中繼節點。因此,電液控制系統的CAN總線上包括兩類節點,普通節點與中繼節點。
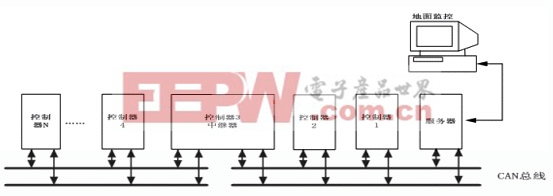
圖1基于CAN總線的電液控制系統
3.1普通CAN節點設計
CAN總線的兩層協議固化在它的相關芯片中,主要是總線控制器和總線驅動器。總線驅動器選用Philips的PCA82C250。總線控制器則采用Motorola單片機中自帶的MSCAN模塊。該模塊是Motorola為16位MCU設計的通用CAN通信模塊。采用自帶CAN模塊的Motorola單片機在最大程度上簡化了節點電路的設計,普通CAN節點設計的電路原理圖如圖2所示。
3.2CAN總線中繼節點的設計
普通CAN節點只需使用1個MSCAN模塊,而CAN總線中繼節點則要用到單片機中的2個MSCAN模塊,通過外加驅動電路分別連接到CAN總線的兩個網段上,實現中繼的功能。
中繼節點接收3種數據幀:廣播數據幀,需要被轉發的數據幀以及針對中繼節點的數據幀。對應于要接收的3種數據幀,分別設置3個接收濾波器。而普通節點只需設置2個濾波器即可滿足要求。從轉發的方式來講,轉發有直接轉發和翻譯轉發兩種。直接轉發是最簡單的轉發方式。采用直接轉發方式要求兩個網段具有相同的數據幀格式,而數據幀格式不同時則需要采用翻譯轉發的方式。在液壓支架電液控制系統中,所有網段的數據幀格式都是相同的。因此,中繼節點采用直接轉發方式。
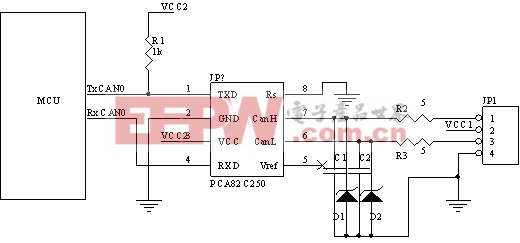
圖2CAN總線節點電路原理圖











評論