復雜背景下的車牌自動識別系統

為提高聚類的收斂速度,還需對隸屬度進行修正,在半抑制式模糊C-均值聚類算法(HSFCM)中引入了一抑制門限參數β,將最大隸屬度值uRj與該門限進行比較,若其大于該門限,則對其進行修正;否則就不對其修正。為了更好地提高聚類的速度,將隸屬度修正公式變為:本文引用地址:http://www.104case.com/article/163512.htm
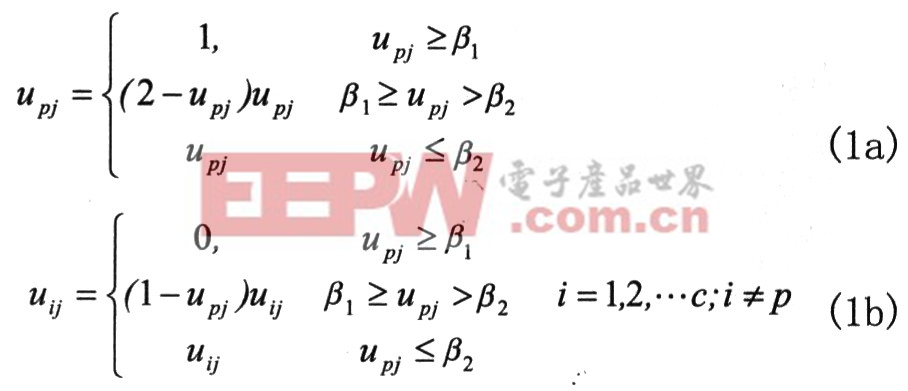
在式(1a),當最大隸屬度值uRi大于門限值β1時,uRi=1,轉為硬C聚類算法;當uRi小于門限值β2時,不修正;當β1≥uRj>β 2時,uRj增加為原來的2-uRj倍,提高其隸屬度。在式(1b)中,將其它隸屬度做相應的修改,以滿足

改進后的模糊C-均值聚類算法的具體操作步驟如下:
(1)對圖像進行灰度處理,獲得灰度值的極值點及個數來初始化聚類中心初始聚類中心V(0)及聚類數目C,并具體選取ε>0,令迭代次數k=0。
(2)計算U(K),如果∨j,r,drj(k)>0,則
如果存在j,r,使得drj(k)=0,則令urj(k)=1,且i≠r,uij(k)=0。
(3)根據式(1a)、(1b),修正隸屬度矩陣U(k)。

(5)如果||V(k)-V(k+1)||ε,則停止,否則令k=k+1,重復步驟(2)、(3)、(4)、(5)。
對圖1所示的原始圖像中,處理后的灰度直方圖如圖2所示,獲得的極值點的個數(即聚類數目)為4,聚類中心灰度值特征量的初始化值分別為(21、66、141、186)。通過改進FCM算法后,獲得分割后的圖像如圖3所示。










評論