基于LIN總線的車燈控制系統設計

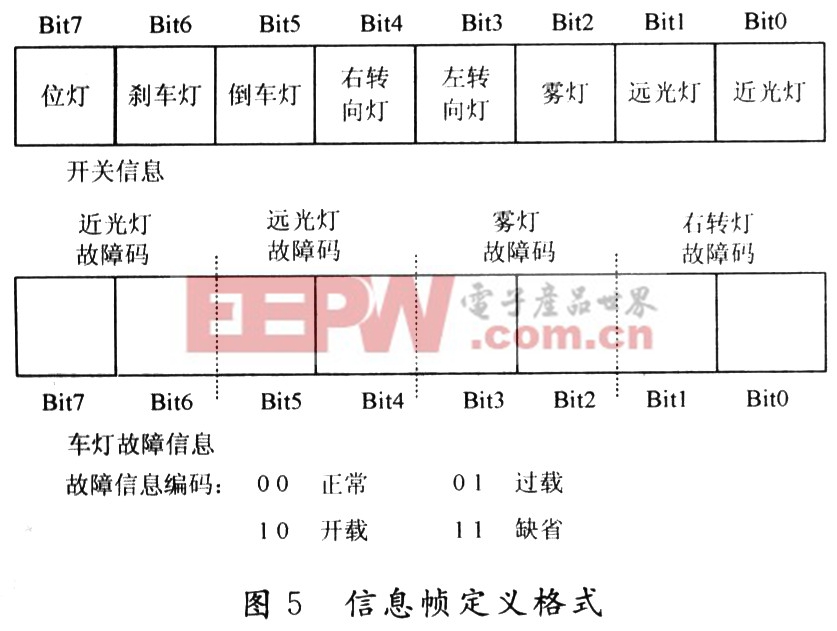
LIN網絡主機節點包含主機任務,負責對報文傳輸進行調度。LIN通訊協議中沒有定義仲裁機制,因此任何從機任務想要發送報文必須通過主機任務的調度:主機任務發送報文頭,標識符匹配的從機任務發送響應幀。LIN網絡中每一個節點都包含從機任務。主機節點中的從機任務負責將車燈的開關信息發送給各從機節點,接收來自從機節點的響應幀;從機節點中的從機任務負責將從機檢測到的故障信息發送給主機節點,接收主機節點發送的開關信息。開關信息,和故障信息各占用一個字節從屬LIN報文幀的數據場,其定義格式如圖5,其中開關信息占用一個數據字節,包含所有的車燈開關信息,邏輯“O”表示相應位中車燈開關閉合,邏輯“1”表示相應位中車燈開關斷開;每個從機節點的車燈故障信息占用一個數據字節,圖5中顯示的是右前方車燈的故障信息,故障信息的編碼如圖中所示。本文引用地址:http://www.104case.com/article/163369.htm
3.2 車燈負載智能驅動軟件設計
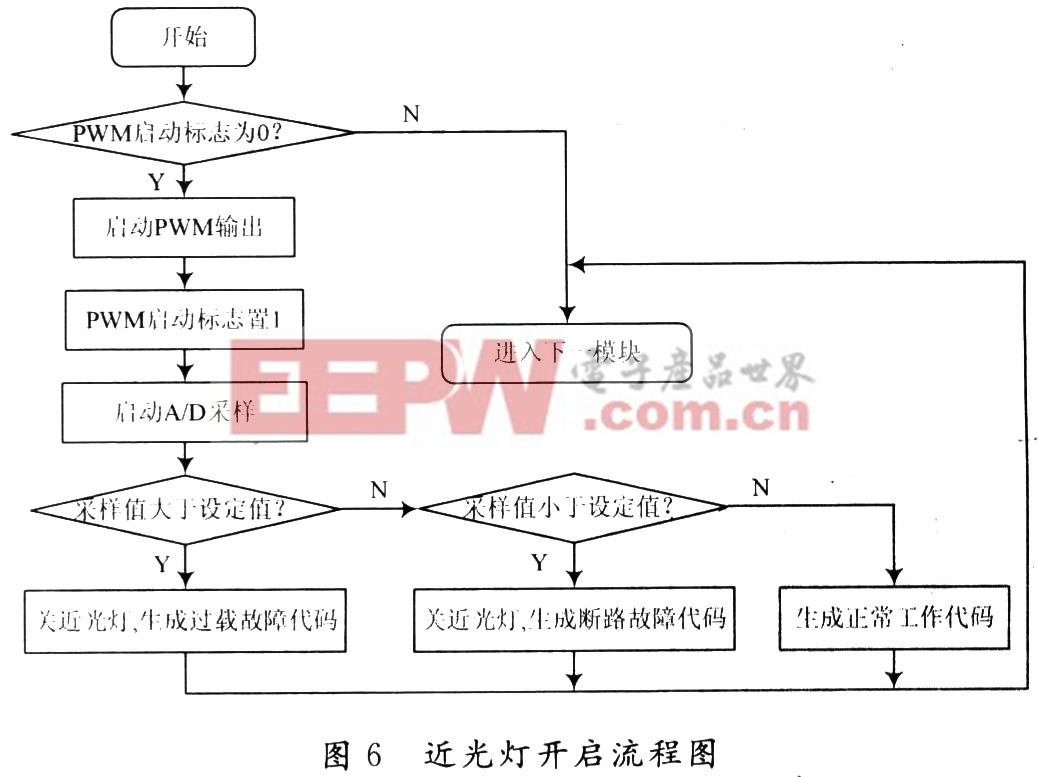
車燈負載故障最容易發生在開啟的一瞬間,為了減少大燈(近光燈)開啟時的瞬間電流過沖,延長大燈的使用壽命,在開啟時采用PwM控制方式,開啟時逐步提高PWM占空比直到100%,使近光燈的電壓逐步上升到電源電壓,近光燈的控制開關采用BTS6143D芯片,其內部集成的電流反饋功能,能根據實際通過車燈的電流輸出一個與之成正比的反饋電流,圖3中反饋引腳IS端的外圍電路設計是將電流輸出轉換為O~5V電壓輸出供從機MCU的A/D采樣。在系統運行時根據命令開通控制開關后,將啟動A/D實時采集電壓反饋,如果采樣值低于設定值則認定為車燈斷路故障,如果采樣值大于設定值則認定為過載或短路故障,從機MCU將迅速關閉開關以保護該器件,并生成相應的故障信息待主機詢問時將其反饋給主機節點,主機節點解碼故障信息并通過發光二極管顯示出來。近光燈的軟件設計流程如圖6所示。
3.3 抗干擾冗余軟件設計
汽車運行時的工況極其惡劣,發電機的供電電壓在較大范圍內波動以及發動機點火瞬間高頻電磁干擾等對車身網絡系統而言都是很大的干擾;汽車使用過程中,由于線路絕緣磨損或者接插件不可靠等因素,可能出現LIN子節點從網絡中斷開或者短路等情況。據此,將總線故障劃分為瞬間干擾故障和永久性故障,并進行了相應的可靠性冗余設計:在硬件上采用汽車級的高性能芯片,在軟件通訊設計上對子節點的命令及狀態信息采取反饋機制:主機將開關信息發送給各從機節點后,啟動500 ms定時器,計時時間到后主機依次詢問各子節點,請求其反饋各自的狀態信息。在這種機制下,一旦子節點在通訊中出現:沒有反饋命令和狀態;數據幀校驗和錯誤;子節點接收到的命令與主節點發送的命令不一致等情況,主節點馬上重新發送命令,確保各個子節點信息接收的正確性。如果某一個從機節點長時間沒有反饋信息,則可認定此節點已從網絡中丟失,主機節點生成相應故障信息,并通過發光二極管顯示出來;如果LIN總線與地短接,LIN總線一直成顯性狀態(低電平狀態),則主機不能接收到任何從機節點的反饋信息,主機將關閉LIN收發器,保護此器件,并將故障顯示給駕駛員。
4 結 語
提出一個基于LIN總線的車燈控制系統方案,實驗證明總線化的控制系統方案較傳統的集中式控制方案具有布線簡單,結構清晰,不同控制模塊間的獨立性強,便于以后的系統檢修及系統的升級擴展等優點,具有一定的可行性。










評論