基于微控制器的數字式溫度伺服控制系統

4 伺服系統軟件設計
本系統的軟件設計也主要是基于ARM 芯片進行的,C 語言的可讀性和可移植性都非常好,這樣就能極大地縮短嵌入式軟件開發的周期,對于實時性要求不是很高的場合,應用C 語言來編寫ARM 程序,將是未來的主流之一。系統程序開發總體結構如圖4。電機伺服調速系統軟件總體結構分為初始化設定模塊、轉速調節模塊、電流調節模塊、PWM 更新模塊等4大部分組成。主程序只要調用每個模塊即可。
1、系統初始化。由于本系統使用C 語言進行軟件系統設計,所以必須首先建立C 語言運行環境,這項任務由Startups 這個函數來完成,運行這個函數的方法是可以在程序開始調用這個函數。采用的方法是加載工程模板ARM Executable LPC2200,其中已經包含了Startup.s函數。主要包括時鐘初始化、中斷向量初始化、I/O 口初始化、通用定時器初始化、捕獲單元初始化和A/D 轉換單元初始化幾部分。
2、轉速調節模塊。轉速調節模塊由轉速計算、換相控制、轉速PI 調節3 部分組成。電機轉速的計算放在捕獲中斷服務子程序中進行。我們知道霍爾位置傳感器的信號在電機轉子旋轉一周周期中有6 次換相,就是說每轉過60°機械角都有一次換相,這樣,只要檢測兩次換相的時間間隔△t,計算出兩次換相期間的平均角速度。為了保證得到最大的轉矩,就必須不斷的對無刷電機進行換相。掌握恰到好處的換相時刻,可以減少轉矩波動,因而換相的檢測是十分重要的。在程序設計中,換相控制安排在換相中斷服務子程序中完成。霍爾位置傳感器的信號波形如圖5-4 所示,每一個霍爾傳感器都會產生1800 的脈寬信號,三個霍爾傳感器的輸出信號相差1200 相位差。這樣在轉子旋轉一周,正好產生6 個上升、下降沿,對應了6 個換相時刻。通過將CAP0.0/CAPO.1/CAP0.2 設置成雙邊沿捕獲就可以捕獲這6 個時刻。同時,要將讀入的三個捕獲口的控制字,變換成對應的開關管控制字。
3、電流采樣模塊。電流采樣是通過0.5Ω 精密無感電阻R 來實現的。電阻值的選擇要考慮當過流發生是能輸出的最大電壓,同時起到過流檢測的作用。每一個PWM 周期對電流采樣一次。本系統中PWM 周期是50μs,所以電流的采樣頻率為20KHz。電流采樣中有一個問題需要特別注意,就是電流采樣時刻的選擇。由于對開關管采用單極性PWM 控制,在PWM“關”期間,電流經過常開的開關管和另一個開關管的續流二極管形成續流回路,這個續流回路并不經過電流檢測電阻R,因此在R 上也沒有壓降,所以在PWM 周期“關”器件不能電流采樣。
5 直流無刷電機調速控制算法
從理論上看,無刷直流電機的感應電動勢和電磁轉矩的公式如下:
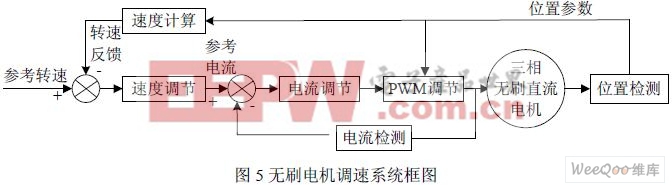
由以上兩個公式可見,感應電動勢與轉子轉速成正比,電磁轉矩與定子電流成正比,所以我對無刷電機的調速系統采用了如圖5 的控制策略。
本系統中,以高性能ARNI 芯片lpc2214 為核心,采用PWM 控制方式控制電機的轉速和電流,霍耳元件檢測轉子位置,以功率MOSFET 場效應管作為功率變換器件,實現全數字交流溫度伺服系統。
本文作者創新點
本文針對數碼變溫空調溫度伺服系統的控制特點,提出了一種基于lpc2214 全數字溫度伺服控制系統,完成了系統的總體方案設計,同時又系統的軟、硬件各部分進行了詳細的設計與實現。通過合理的利用ARM 的片內資源,解決了硬件系統冗余控制難題;根據伺服系統的控制要求,選用了方波無刷直流電機作為伺服系統的執行機構;根據無刷電機的控制要求,設計了基于功率MOSFET 和柵極接口驅動芯片IR2130 的驅動電路。










評論