基于CAN總線技術實現的船舶電站自動控制系統

 本文引用地址:http://www.104case.com/article/163183.htm
本文引用地址:http://www.104case.com/article/163183.htm
2.4帶 CAN總線的執行器
MCU的 I/O口可以配置為輸出,根據需要將相應的 I/O配置成輸出后,接到光電耦合單元,其輸出再經過三極管驅動繼電器實現繼電器的輸出。執行器的控制為其控制電源經過繼電器的觸點后送到執行器上,控制其正反運轉實現相應的調節,或控制電磁閥回路的通斷等。在一些特殊場合,MCU的輸出可經過光電耦合后再經三極管驅動MOSFET,實現 PWM的調節控制,或有關的執行器件的動作調節。 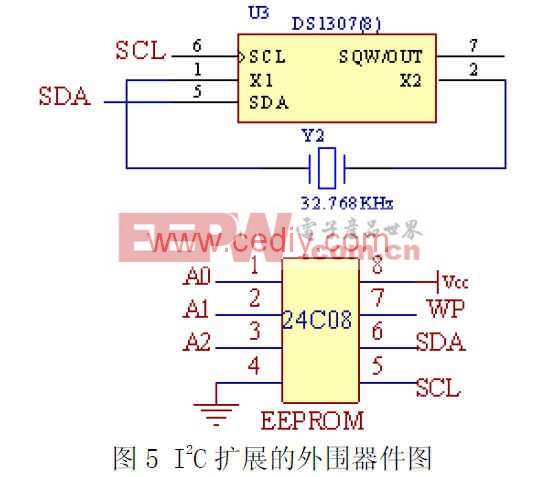
3. 帶CAN總線接口的各種控制器
帶 CAN總線的控制器 CAN接口與上述 MCU的相同,在控制器中,輸入輸出不是主要的,主要的是 MCU的運算能力,存儲能力,控制能力,顯示驅動等,所以考慮使用的 MCU為 PIC系列中較為高端的MCU,其硬件電路也大同小異,除與圖 3使用 CAN接口電路相同外,另外為配合需要使用了一些帶I 2C的擴展電路,如EEPROM,時鐘電路等,如圖5所示,其中SCL,SDA為 MCU中自帶的 I 2C的接口,定義為時鐘線和數據線,A0,A1,A2為相同器件同時使用時的選擇信號,由 MCU控制,U3為時鐘芯片DS1307,與為時鐘源晶振,24C08為I 2C接口的EEPROM。如需要其他功能,可以在原來I 2C總線接口電路上再擴展。在此硬件基礎上,通過 CAN接受總線上的信息,各控制器按其需要的功能編制相應的軟件,并將相應的輸出信號通過 CAN發送到對應的輸出 CAN接口模塊去。控制器按具體位置和功能分成發動機控制器、自動調壓及無功調節控制器、配電保護控制器、同步并車控制器、電能管理控制器等。
4.冗余控制技術
除主要的電能管理控制器 PMU外,設計的其他幾個控制器的硬件電路接近,實現的功能不同,但是可以通過軟件實現相互間的控制冗余,所以在實際設計中,每個控制器內設計
成兩套控制程序,正常情況下,一套本身主要的程序在工作,另一套作為其它控制器的備用在讀取 CAN總線上的數據,但是備用的程序不作輸出動作。當系統中某控制器故障出現時,CAN總線網絡上無該控制器正常工作的心跳信號后,作為它備用的控制器將其備用的程序喚醒工作并輸出,以替代故障的控制器,同時在工作的控制器上出現相應的顯示。系統設計中各控制相互冗余備用的關系如表 1所示,其中電能管理控制器可以作為其他控制器的備用。
除控制器具備的冗余外,前述 CAN總線均采用雙 CAN接口,實際線路也是對應的雙 CAN網絡,其中一個 CAN總線出現故障后,系統可以自動啟用備用 CAN網絡,從而實現 CAN總線的冗余控制。
5. 結論
船舶電站控制系統采用分布式結構 , 硬件設計標準化,軟件設計模塊化,使整個系統設計組合較為靈活,這種設計方法對于其他項目的研制也具有一定參考價值。系統實際運行效果良好,工作可靠,說明 CAN總線技術在船舶電站中的使用是成功的,并可推廣使用。
本文創新點:昀初開發的 CAN協議被運用于汽車制造領域,現把 CAN技術移植到船舶電站的控制方面,實現了船舶電站的無人操縱、過程自動控制及遠程監控,提高了船舶自動化程度,改善了系統性能。











評論