數字馬達控制系統的量化誤差設計方案

要比較三種數據格式對數值精度的影響,需要監控估算的速度響應與相應的 d 及 q 軸參考電流。將所有的 PI 增益、參數、基本量在全部三種數據格式的仿真過程中設定為相同的有效值。從圖3可以看出,16 位定點版本與浮點版本的性能具有極大的差別。
從圖3中數值性能的比較可以看出,16 位定點系統有若干個偽瞬態 (false transient) 與振鈴,而 32 位系統則沒有這些現象。32 位單精度浮點與 32 位定點的結果非常相近。
在現實系統中,這些瞬態現象會產生可聽到的噪聲及振動,從而引起許多不良后果。尤其不利的是在第一個速度級別出現的估測速度振蕩瞬態的衰減以及隨后的增長,圖3中顯示,此次的觀察值十分接近 16 位系統的邊緣值。另一方面,具有控制響應的 32 位定點仿真系統的性能良好。
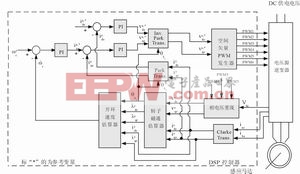
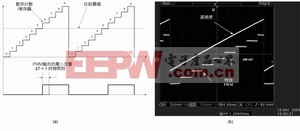
圖5 標準 PWM 方案圖,以及高分辨率 PWM 與傳統 PWM 的示波器圖比較
溢出現象一般會發生在通過控制算法進行一系列的加、減法運算時。通過縮放算法來降低實際工作中的溢出可能性通常可達到調整溢出的目的。可使用額外的邊緣標簽保護位 (margins labeled guard bit) 來完成。控制算法一般在標么系統 (per-unit system) 中進行標準化,以便按比例縮放所有物理變量(電壓、電流、扭矩、速度及磁通量等)。使用合適的縮放比例可消除溢出這一量化誤差源。造成量化誤差的數值計算范例包括乘、除法運算以及三角、指數、平方根等查表數學函數。









評論