基于CAN總線的聯合收割機智能控制系統的設計與實現

2.6.2 谷物濕度傳感器
谷物濕度傳感器是獲取收獲時谷物的濕度,以便將所有的產量轉換成標準值。在聯合收割機上使用的谷物濕度傳感器,主要按照極板式電容傳感器原理設計。
2.6.3 割臺高度傳感器
割臺高度用來指示當前收割機是處于收割狀態還是抬起狀態,它的測量可以通過電位器(或接觸開關)來實現。
2.6.4 地速的測量
地速可利用傳統的雷達法、變速箱軸轉速法以及GPS來測量,這些方法都有各自的局限性,將這幾種方法互補使用,將是理想的測量方法。
2.6.5 轉速的測量
轉速有光電脈沖法(包括精密的光電編碼器)、霍爾元件法等很多成熟技術可供選用。
2.6.6 割幅寬度的測量
割幅寬度可以使用超聲波進行測量。
2.7 系統抗干擾設計
2.7.1 系統硬件抗干擾設計
(1)濾波技術
a.將電源變壓器的進線段加入濾波器,以削弱瞬變噪聲干擾。
b.在直流電源線和地線之間接濾波電容,以抑制電源噪聲。
(2)去耦電路
在印刷電路板的各個集成電路的電源線端與地線端之間配置去耦電容。
(3)屏蔽技術
屏蔽技術主要由電場屏蔽、電磁場屏蔽和磁場屏蔽三類,本系統采用電場和電磁場屏蔽的方法。主要使用低電阻材料作為屏蔽材料,把需要隔離的部分保衛起來。磁場屏蔽則應采用高導磁率的材料。
(4)光電隔離
在I/O通道上采用光電隔離器,將單片機系統與各種傳感器、開關從電氣上隔離開來,很大一部分干擾可被擋。
2.7.2 系統軟件抗干擾設計
對于微機測控系統,僅僅考慮硬件的抗干擾是遠遠不夠的,采取一定的軟件抗干擾措施非常必要,它不僅能降低系統的硬件成本,又可以充分發揮軟件的優勢,使系統具有自我診斷、自我恢復的能力。本系統采用的軟件抗干擾措施主要有以下幾種:
(1)數字濾波技術,采用數字濾波技術除去輸入信號中所摻雜的各種隨機干擾。
(2)軟件陷阱技術,當系統受到干擾,PC值發生變化,程序“亂飛”等情況,可以用軟件陷阱和看門狗將程序拉回到復位狀態。具體的講,可以在RAM中埋一些標志,在每次程序復位時,通過這些標志,可以判斷復位原因并根據不同的標志直接跳到相應的程序。這樣可以使程序運行有連續性,用戶在使用時也不易察覺到程序被重新復位過。本文引用地址:http://www.104case.com/article/163159.htm
3 軟件設計
本系統軟件主要由CAN總線通信、數據實時處理、LCD顯示子程序、觸摸屏控制數據存儲和變量作業處方圖文件讀取等六大模塊組成,因為C語言編寫的軟件易于實現模塊化,生成的機器代碼質量高、可讀性強、移植性好,所以本系統的軟件采用C語言編寫,在WAVE6000編譯器環境下編寫代碼和調試。
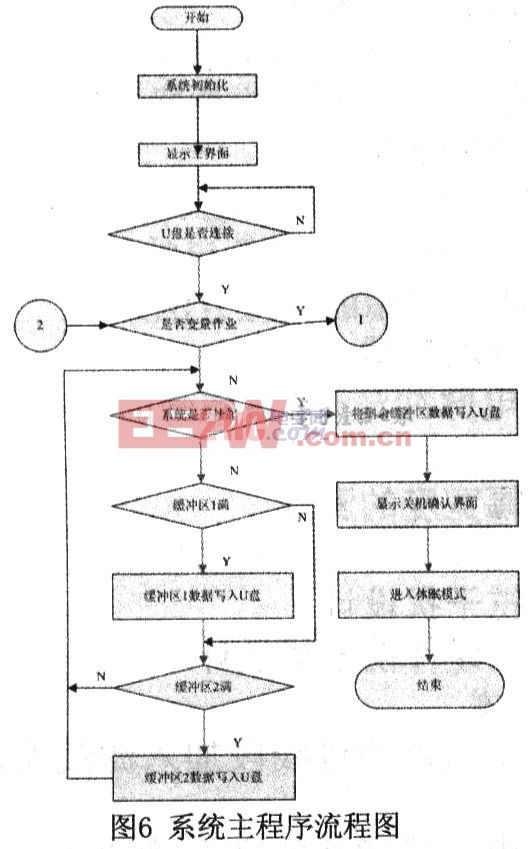
主程序主要完成硬件初始化、子程序調用等功能,主程序流程圖如圖6所示。
4 結束語
隨著電子技術的廣泛應用,智能溫室控制必將成為一種發展趨勢,文中提出利用P87C591單片機和新型傳感器對聯合收割機環境進行測試,目前原型機己取得成功。調試結果表明,本系統可靠性高、使用方便,下一步將在此基礎上開發控制系統,給用戶提供更大的方便。











評論