智能給水控制器設計

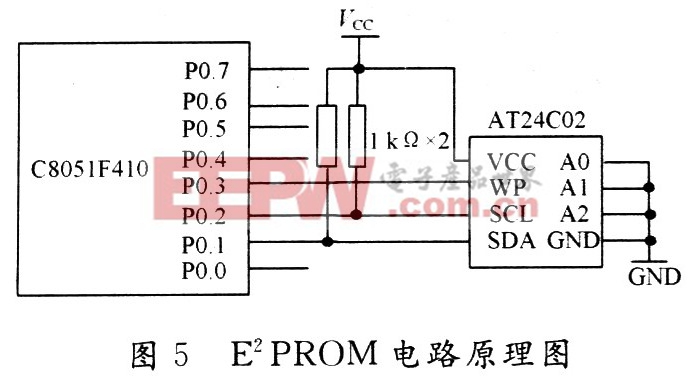
該設計采用Atmel公司的E2PROM芯片AT24C02,其體積小,性能優,使用靈活方便,能夠在系統掉電之后存儲一些用戶設定和運行的狀態參數,以便重新啟動機器之后讀取。處理器自身集成的SMBus兼容I2C接口,可以直接與AT24C02通信,此方案不僅設計單,工作可靠,而且成本低廉。電路原理如圖5所示。本文引用地址:http://www.104case.com/article/163113.htm
3.6 繼電器控制輸出電路
主控制器驅動5個靈敏繼電器K1~K5,分別控制1個泄流閥和2個泵電機,實現對泄流閥的打開與關斷控制和泵的變頻或工頻狀態切換。單片機通過信號線RX與TX將繼電器狀態控制信號串行輸出給串行移位寄存器芯片74HC595D,由74HC595D將輸出狀態的硬件鎖存,以防止輸出狀態被干擾,最后通過達林頓管ULN2003提高驅動能力,以控制水泵電機的工作狀態和泄流閥的動作。
4 控制器的軟件設計
該設計中對變頻器輸出頻率的調節采用PID控制算法,其控制算法就是對偏差的比例、積分和微分。它是連續系統中技術成熟,應用最廣泛的一種算法,特別是在工業控制中,因為控制對象的精確數學模型很難建立,系統參數又經常發生變化,因此常采用PID控制算法,其控制示意圖如圖6所示。
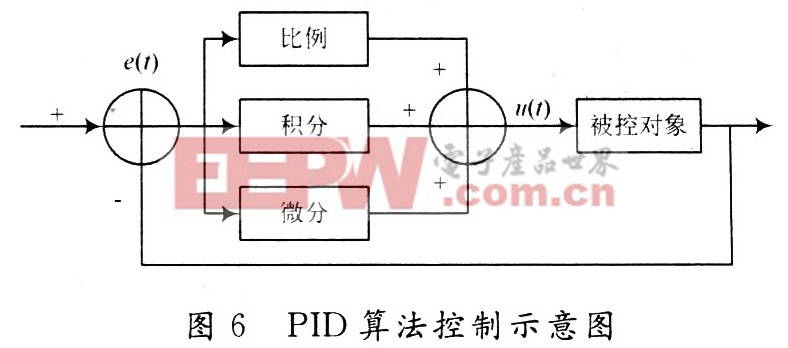
它的數學表達式為:

式中:KP,KI和KD分別為比例系數、積分系數和微分系數;e(t)為誤差。
式(1)離散化后可以用計算機很方便地實現,其位置式PID控制規律的數學表達式為:

式中:e(j)為第j次采樣的誤差值;T為采樣周期。
在實際應用中,一般選擇增量式PID控制規律。因為增量型算法與位置型算法相比,前者不需要做累加,不易產生大的累加誤差,而且得出的是控制量的增量,誤動作的影響比較小,更易于實現手動到自動的無沖擊切換。增量式數字PID控制算式為:
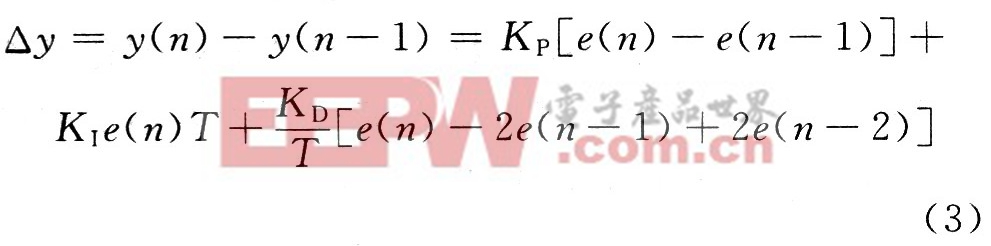
在該設計中,執行機構采用變頻器,由于采用增量式數字PID控制算法,所以對于每個采樣周期,控制器輸出的控制量都相對于上次的增加量,其系統控制算法流程如圖7所示。
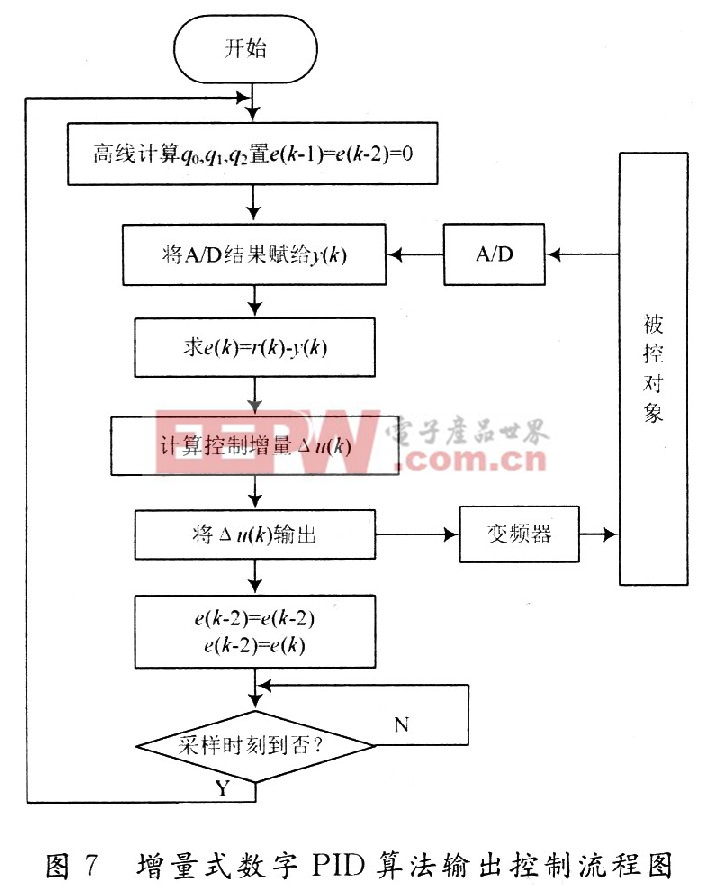
圖7為增量式數字PID算法在整個系統中的控制流程,每次進入A/D定時采集中斷,壓力信號便會被轉化為數字量,PID控制模塊便將壓力信號的數字量通過算法處理得出相應的控制輸出數字量,接著啟動D/A將數字輸出轉換為模擬電壓輸出,其模擬電壓輸出用以控制變頻器。此模塊配合繼電器開關輸出模塊和壓力采集模塊,通過相應的控制策略實現實時測量和控制,保持供水管網壓力的動態平衡。為了方便現場調試,在設計中使PID調整的上升、下降和跟蹤采樣周期的設定值可變,可以在開機時通過鍵盤改變其值,從而改變PID參數,以適應不同場合的控制需要。如圖8所示,曲線1是參數調整前電機模塊控制電壓隨時間變化的響應曲線;曲線2為參數經過多次調整之后的響應曲線。可以看出,經過參數調整,系統的響應性能有了較大的提高,所以在實際應用環境中需要經過多次調整設定值,以保證達到最佳的控制性能。

5 結語
分析了智能給水控制器的軟件和硬件設計。該控制器以SoC單片機C8051F410為核心,實現了對管網壓力的采集,對變頻器輸出的控制,而且擁有獨特靈活的用戶界面。控制器不但采樣和控制精度高,而且有多種保護和抗干擾功能,保證了控制器的穩定性和安全性。采用控制器和變頻器構成的恒壓供水系統,不僅大大提高了供水質量,而且節能降耗效果也較為顯著,在當今國家能源緊張的情況下,具有重要的現實意義。

pid控制器相關文章:pid控制器原理
電接點壓力表相關文章:電接點壓力表原理









評論