基于HCS08的數控工作臺控制系統設計與建模

校零是設定當前的位置為零點位置,通過上位機操作將數據寫入Flash中,在下次上電工作時工作臺會在自動找零時,自動運行到這個設定的零點位置。由圖2可以清楚地看到,整個狀態模型可以分為4個部分:自動找零狀態、手動控制狀態(包括高低速轉換、三軸電機運動的方向)、校零狀態和故障狀態。其中故障狀態可以與其他的狀態根據轉移條件發生狀態轉移,而手動控制狀態只能與校零狀態和故障狀態根據轉移條件發生狀態轉移,其內部各個狀態之間不能發生狀態轉移,這是由工作臺的工作特性所決定的。從上電開始工作,在同一時間內只允許進行一種活動,只有在當前活動結束后才允許進行其他的活動,這種工作臺的工作特性就可以用UML狀態圖[6]清晰地表現出來,使得任何人都能對系統軟件模型有比較直觀的認識。
根據狀態來劃分整個系統軟件結構[2],可以有效地對系統工作進行掌控,防止軟件功能互相耦合而引起邏輯混亂。簡單來說,當系統正處在手動控制中,如果此時收到校零指令,系統就可以根據當前狀態轉移條件轉移到校零狀態,工作臺會按順序依次走到各軸的兩端限位位置,將兩端限位之間的距離保存到Flash中以便下次讀取,這樣就提高了系統的穩定性和可靠性。
3.2 下位機軟件算法活動模型
鑒于數控工作臺在日常生產中對于控制的要求,以及Freescale HCS08的特點,在設計軟件算法程序時,對電機發脈沖采用PWM重載中斷的方式,這樣極大地發揮了芯片的性能,并且提高了程序的可靠性。下面采用UML活動圖將主循環流程按照時間的順序展開,如圖3所示。本文引用地址:http://www.104case.com/article/163078.htm
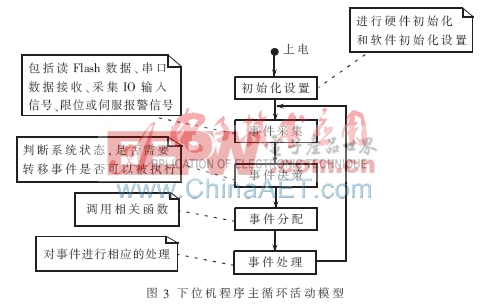
從圖3中能夠清楚地看到下位機程序就是一直循環采集和事件處理的過程。系統一上電首先對硬件模塊和軟件功能進行初始化設置,保證程序處在可運行狀態。然后程序進入主循環,先進行事件采集,包括讀寫Flash、串口數據接收、限位傳感器輸入信號以及伺服報警信號采集。如果沒有事件發生,則程序一直處于事件采集狀態;如果有事件發生,則對采集到的事件進行分析決策。事件決策則是對當前系統狀態進行判斷和轉移,決定哪些事件可以被執行。最后事件分配和事件處理則是將被允許執行的事件分配給相關的執行函數,調用相關函數來對事件進行處理,完成后返回到主循環開始,而程序也因此周而復始地一直執行下去。
由此可以看出,在程序中事件按從總體到個別的順序被執行,每一步都有明確的目的性和層次性,條理清晰,邏輯清楚,這樣就使得程序在編制和維護時簡單易行。
由于下位機采用的Freescale HCS08型單片機作為控制系統核心,其運算處理速度能達到每秒20 M條指令,這樣就使得下位機程序對外部事件有了較高的響應速度和處理速度,其實時性可以比較好地滿足數控工作臺的應用需求。
3.3 下位機軟件通信模塊設計
Freescale HCS08單片機采用異步通信RS-232作為串行通信協議,其適用于設備之間的通信距離不大于15 m、傳輸速度最大為20 KB/s的數據傳輸領域。本系統采用標準不歸零NRZ(Non Return to Zero)的數據格式進行數據交互。
本文介紹了數控工作臺下位機程序設計與建模,分析和構建了下位機軟件的主要功能、實現方式和軟件算法,并通過UML圖分別展示了下位機供需用例圖、軟件狀態模型和主循環活動模型。使用UML圖進行軟件設計使得軟件層次更加清晰,結構嚴謹,可維護性強,充分體現出UML圖[7]在面向對象的軟件編程中起到的重要作用。同時,本文所敘述的軟件設計與建模的方法, 對其他下位機的軟件開發也有很好的借鑒作用。









評論