基于HCS08的數(shù)控工作臺控制系統(tǒng)設(shè)計與建模

UML[1]是一種可用于大型系統(tǒng)建模的統(tǒng)一建模語言, 它不僅支持面向?qū)ο蟮姆治龊?a class="contentlabel" href="http://www.104case.com/news/listbylabel/label/設(shè)計">設(shè)計, 還支持軟件開發(fā)過程,利用不同的模型來描述一個應(yīng)用系統(tǒng)在不同生命周期中的各種靜態(tài)結(jié)構(gòu)方面和動態(tài)行為方面的特征, 為任何具有靜態(tài)結(jié)構(gòu)和動態(tài)行為的系統(tǒng)建模,同時提供模型擴展和管理等方面的支持。
本文針對數(shù)控工作臺的功能特點,以自主開發(fā)的基于HCS08運動控制系統(tǒng)為平臺,并以UML為工具,設(shè)計相應(yīng)的軟件,滿足實際生產(chǎn)需要。
1 數(shù)控工作臺控制原理
工作臺運動系統(tǒng)主要由手柄、載物臺等運動機構(gòu)組成。系統(tǒng)以Freescale HCS08型單片機為核心的運動控制器作為下位機,通過控制伺服電機驅(qū)動器來實現(xiàn)對載物臺上下、左右、前后運動的控制,以PC作為上位機來實現(xiàn)調(diào)速、自動校零、自動找零、位置顯示等。
上下位機通過串口進(jìn)行數(shù)據(jù)傳輸。工作臺工作時,用戶將測量工件(如絲桿)放在載物臺上,通過操作手柄讓載物臺走到測量范圍內(nèi),通過手柄的高低速按鍵控制電機的高速或低速運動,方便測量時的粗調(diào)和微調(diào)。
2 數(shù)控工作臺功能分析
本文的主要任務(wù)是根據(jù)用戶對系統(tǒng)功能需求進(jìn)行分析,通過對整個系統(tǒng)框架進(jìn)行構(gòu)造和實現(xiàn)下位機軟件設(shè)計與建模。下位機是整個系統(tǒng)的中間層,主要功能是根據(jù)接收的數(shù)據(jù)和指令控制工作臺運動。通過上位機界面可以設(shè)定各軸的速度和電機轉(zhuǎn)動方向,以及實時位置顯示、零點位置顯示等,具體可為自動找零、校零、手動操作、伺服報警信號等。
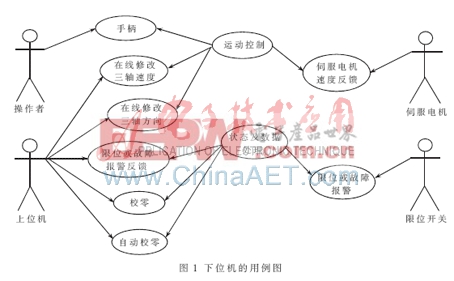
對于下位機,參與者包括用戶、上位機、限位開關(guān)、手柄、伺服電機。用戶除了可以通過上位機軟件顯示零點位置、實時位置之外,還可以通過調(diào)速界面調(diào)整伺服電機轉(zhuǎn)速和方向,故下位機的用戶用例為手柄控制。上位機和下位機的連接是系統(tǒng)的關(guān)鍵部分,是整個系統(tǒng)正常運轉(zhuǎn)的通道。伺服電機是動作的執(zhí)行者,根據(jù)下位機的指令進(jìn)行動作,其用例主要是高低速度控制。限位開關(guān)的用例主要包括I/O信號、限位、故障報警。
根據(jù)上面的用例分析,使用UML構(gòu)造下位機的用例圖[6],如圖1所示。
3 下位機軟件結(jié)構(gòu)
3.1下位機軟件狀態(tài)模型
通過對數(shù)控工作臺下位機用例圖的分析可以將下位機軟件按狀態(tài)分為幾個模塊:自動找零點狀態(tài)、手動控制狀態(tài)、校零狀態(tài)、故障狀態(tài)等。采用UML狀態(tài)圖可以將參與交互的模塊及模塊之間的消息交互表示清楚,可以比較直觀、高效地建立軟件的狀態(tài)模型。建模如圖2所示。
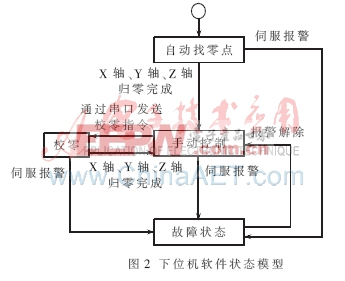
系統(tǒng)進(jìn)入工作狀態(tài)時首先進(jìn)入自動找零狀態(tài)。在自動找零狀態(tài)下,下位機主程序讀取Flash存儲[3]的信息,對3個軸的電機按照先Z軸找零,再X軸、Y軸同時找零的順序發(fā)脈沖,使工作臺運動到工作起點位置。
一旦自動找零完成之后,系統(tǒng)狀態(tài)就會自動轉(zhuǎn)移到手動控制狀態(tài)中去。例如通過手柄控制讓電機走到某個位置,同時通過手柄上的高低速切換按鍵讓工作臺實現(xiàn)高或低速運動。









評論