基于模糊優(yōu)化的PID直流無刷電機(jī)控制

為了實(shí)現(xiàn)實(shí)時(shí)和高準(zhǔn)確率的控制從而提高直流無刷電動(dòng)機(jī)的輸出性能,下面我們將來設(shè)計(jì)一種模糊PID控制器來調(diào)節(jié)PID控制器的增益參數(shù)。
2.1 PID控制
連續(xù)PID控制的數(shù)學(xué)表達(dá)式

式中,e(t)為系統(tǒng)輸入和輸出的差值,u(t)為由PID控制器產(chǎn)生的控制信號(hào),Kp為比例增益,T1為積分時(shí)間常數(shù),TD為微分時(shí)間常數(shù)。
離散PID控制的數(shù)學(xué)表達(dá)式

式中,KI=KPT/TI,KD=KPTD/T,T為采樣周期;KP,KI和KD為3個(gè)可調(diào)節(jié)的參數(shù)。PID控制器的任務(wù)便是決定這些參數(shù)的值。
2.2 模糊PID控制器
圖2所示是一個(gè)典型的模糊PID控制器的結(jié)構(gòu)圖,圖中nr為給定電動(dòng)機(jī)的轉(zhuǎn)速,n表示實(shí)際電動(dòng)機(jī)的轉(zhuǎn)速,e為系統(tǒng)誤差,ec為e的微分值。當(dāng)電動(dòng)機(jī)工作時(shí),在每個(gè)采樣周期,通過模糊控制指令,模糊推理機(jī)制便檢測e和ec的變化率,從而分別產(chǎn)生它們的模糊變量E和Ec。然后,該控制器將會(huì)即時(shí)對(duì)PID控制器原有的KP,KI和KD三個(gè)參數(shù)進(jìn)行調(diào)節(jié),從而使得PID控制器總是能夠?qū)?a class="contentlabel" href="http://www.104case.com/news/listbylabel/label/直流">直流無刷電動(dòng)機(jī)產(chǎn)生最優(yōu)控制信號(hào)。本文引用地址:http://www.104case.com/article/162874.htm
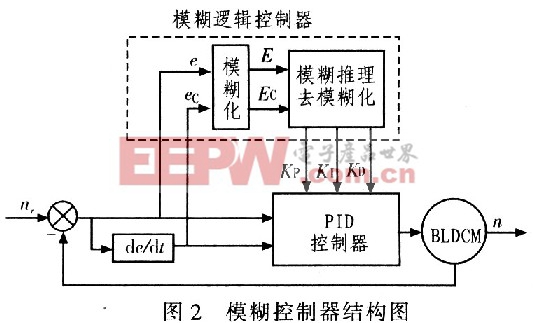
在該系統(tǒng)中,KPf,KIf和KDf表示KP,KI和KD邏輯變量的增量。根據(jù)E(k)和Ec(k)的值,它們的模糊語性值E和Ec如表1所示。

模糊控制規(guī)則是專家的經(jīng)驗(yàn)和操作者的技能加以總結(jié)而得出的模糊條件語句的集合。在本文模糊PID控制方法中,模糊庫用以下49條模糊語句描述: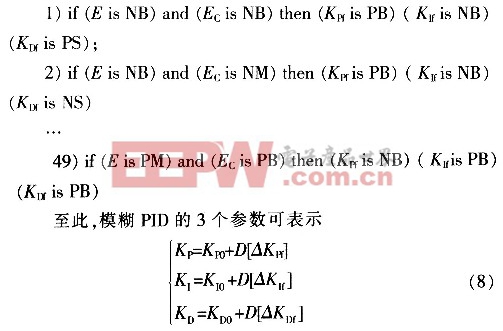
式中,KP0,KI0和KD0為原始的PID控制器參數(shù),一般由Ziegler-Nichols調(diào)試方程給出。D[x]為去模糊過程。
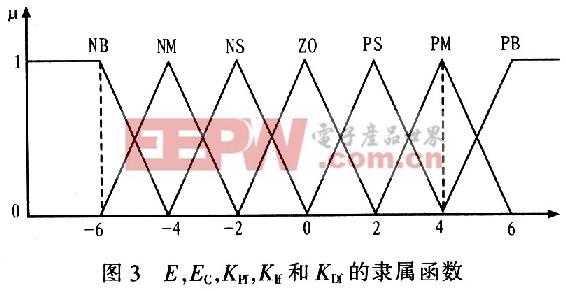
E,Ec,KPf,KIf和KDf的模糊邏輯全部定義為:{NB,NM,NS,ZO,PS,PM,PB},分別代表:大負(fù)、中負(fù)、小負(fù)、零、小正、中正、大正。另外,這些變量的論域全部被定義在-6到+6的整數(shù)區(qū)域,隸屬函數(shù)為三角形函數(shù),如圖3所示。






評(píng)論