NNC-PID控制器對電液位置控制系統的DSP實現

、A18通過由邏輯門器件74AC04和74LVC32組成的譯碼電路后形成片選信號
本文引用地址:http://www.104case.com/article/162840.htm,從而實現了對IS61LV25616的讀寫控制。
神經網絡是一個高度非線性的超大規模連續時間動力系統,具有大規模并行分布處理、高度的魯棒性、自適應性和學習聯想等能力,它能很好地自適環境變化,自學習修改過程參數,這些特性為神經網絡應用到電液位置伺服系統控制中提供了巨大的潛力。
3.1 神經網絡PID控制系統結構
神經網絡PID控制系統結構如圖3(a)所示。從控制系統框圖中可以看出,神經網絡PID控制包括兩個控制子模塊:NNI為被控對象模型辨識器,NNC為神經網絡PID控制器。NNC-PID控制系統的工作原理是:首先獲取實際被控對象的輸入輸出樣本對,然后利用NNI對被控對象進行離線辨識,當辨識精度達到設定的要求時,通過實時調整NNC的權值系數,使系數具有自適應性,從而達到有效控制的目的。
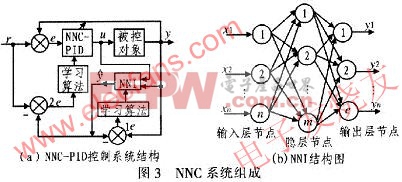
3.2 神經網絡辨識器(被控對象模型辨識器NNI)
神經網絡辨識器NNI采用3層串并聯BP網絡實現,包括輸入層、隱層、輸出層,其結構如圖3(b)所示。網絡的輸入是被控對象的輸入/輸出序列[u(k),y(k)],網絡的輸出為教師信號
。
網絡隱層的輸入輸出為:

3.3 神經網絡NNC-PID控制器(單神經元自適應NNC-PID控制器)
由于被控對象模型不確定、不確知,并且存在著外界隨機擾動,為了達到較高的控制精度,在被控對象模型離線辨識的基礎上,采用單神經元自適應NNC-PID控制器結構,如圖4所示。
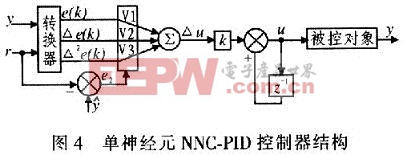
網絡的權值系數值V=[v1,v2,v3],即表征PID控制器的3個系數KP,KI,KD。,網絡的輸入為X=[x1,x2,x3],即表征3個輸入參數e(k)、△e(k)、△2e(k),網絡的輸出為△u(k)。
有監督的Hebb學習規則,通過對權系數的調整來實現自適應、自組織功能,控制算法和學習算法如式(10)和式(11)所示。

pid控制器相關文章:pid控制器原理








評論