高頻斬波式串級調速系統分析

3.3 異步電動機模型
圖3 為異步電動機仿真子系統的內部模型結構,封裝后為四個輸入端、7個輸出端的Motor 子系統模塊(見圖2)。
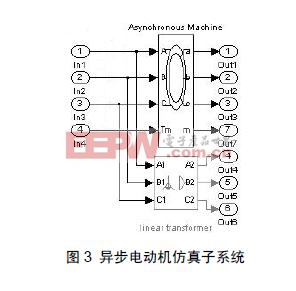
異步電動機模塊(Asynchronous Machine) 的參數設置為繞線式電機,參數折算到轉子側。在定子側串入的三相變壓器(linear transformer)為逆變變壓器。
3.4 啟動過程的仿真
圖4為啟動環節仿真子系統內部模型結構,封裝后為9個輸入端、3個輸出端的Start子系統模塊(見圖2),完成電機平穩起動的任務。
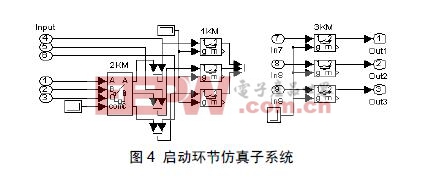
在電機起動時,1KM閉合,2KM、3KM打開,電機轉子回路串入三相頻敏變阻器PF,限制起動電流。當電機轉速升高到設定的允許值時,裝置自動將2KM閉合,切除頻敏變阻器,電機轉子回路經1KM短路,進入全速工作狀態。運行穩定后,1KM斷開,2KM和3KM閉合,接入串級調速控制系統,進入調速運行狀態,調整占空比來改變速度的大小。
3.5 串級調速控制系統的仿真
圖5 為斬波式串級調速系統仿真子系統內部模型結構,封裝后為7 個輸入端、3 個輸出端的Speed Control 子系統模塊(見圖2),通過調整輸入7 的占空比大小完成電機調速的任務。
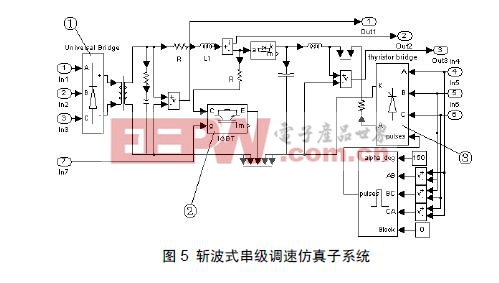
圖5中調速系統的三個核心單元分別為:①Universal Bridge為通用橋模塊,用于模擬三相全波整流單元,將轉子回路三相交流變為直流,以便對轉子回路施加串接直流電勢控制。②IGBT為斬波單元,以恒頻調寬方式工作,由外部的高頻脈沖信號作為IGBT 的門控信號,其占空比和頻率由脈沖信號決定。③Thyristor bridge 為6 脈沖晶閘管橋模塊,用于模擬三相全橋有源逆變器,將經斬波控制后的轉差功率逆變為三相工頻交流送至內反饋繞組,實現節能。
4 仿真實例
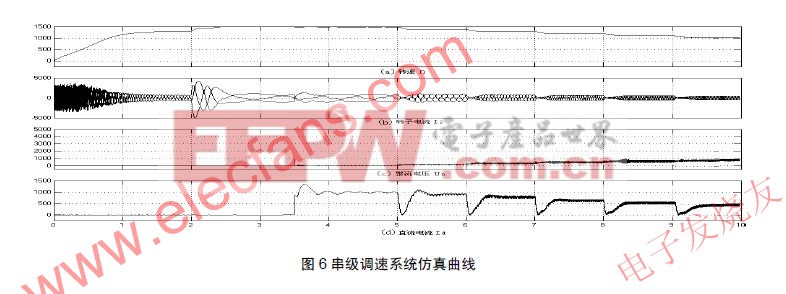
針對適用于風機、泵類等大容量平方轉矩負載的串級調速系統進行仿真試驗,建立如圖2 所示的模型,有關參數設置如下:供電電源為6KV 、50HZ 三相交流電源;異步電動機為額定功率2240KW ,極對數2, 轉動慣量140 kg.m2 。仿真時間0~10 秒,在t=3.5 秒投入調速系統,占空比100% 。t=5 秒后,每間隔1 秒將占空比降低10%,進行仿真試驗。
圖6 為電機啟動、調速運行過程的轉速、A 相轉子電流、整流電壓和直流電流的仿真曲線。可見啟動過程中,電機平穩從零轉速升至全速運行,轉子電流得到有效抑制。調速過程平穩快速,并且隨著占空比的降低,等效附加直流電動勢Ub 增大,轉子電流I2 減小,轉速降低,符合2.2 節的理論分析。
5 結論
本文對高頻斬波式串級調速系統的交流回路和直流回路進行了詳盡分析,并從電氣原理結構圖出發,在 MATLAB/Simulink 環境下利用SimPowerSystem 工具箱和封裝技術為串級調速系統建立了仿真模型。
從仿真實例的結果來看,該模型逼真再現了實際系統的啟動、調速運行等動態過程,說明該仿真方法是有效的,具有工程實用價值。
本文作者創新點:在 MATLAB/Simulink 環境下利用SimPowerSystem 工具箱和封裝技術建立的串級調速系統仿真模型,符合實際工程設計的組成結構,仿真效果真實,為電機調速系統的工程設計提供了理論依據和驗證手段。







評論