基于DSP的無刷直流電機控制系統的研究與設計

引言
近幾年來,隨著電力電子器件和現代控制理論的迅速發展,無刷直流電動機由于沒有接觸式換向裝置,不存在換向引起的火花,其具有效率高,轉速不受機械換向所限制,可維護性強,安全性高等諸多優點,而被人們廣泛應用于光驅、智能機器人、電動交通工具等領域。DSP(數字信號處理器)則以其高速的數據處理能力、豐富的內部資源、集成度高和功耗低等特點,已廣泛應用在控制領域中。本文提出了一種基于DSP的無刷直流電機控制系統的設計方案。該設計結合模糊控制方法來實現無刷直流電動機的智能化控制。
1 無刷直流電機的數學模型
根據物理學公式,單根導體在磁場中切割磁力線運動時,所產生的電動勢e為:
![]()
式中,B為磁場感應強度,l為磁場中導體的有效長度,v為導體垂直于磁力線運動的線速度。在電機中,v與轉速n的關系為:
![]()
這樣,無刷直流電機在運行過程中所感應產生的感應電動勢大小為:
![]()
式中,E為無刷直流電動機產生的感應電動勢;p為電機的極對數;α為極弧系數;W為點數繞組每一相的繞線匝數;ψ為每一極的磁通量;n為電機的轉速。
假設無刷直流電動機的繞組采用三相星型結構,定子三相完全對稱,空間上互差120°的電角度,三相繞組電阻的電感量參數相同。同時忽略電樞繞組之間產生的互感,電機的氣隙磁導均勻,磁路不飽和,并忽略渦流損耗。則無刷直流電動機的數學模型如下:

式中,Va、Vb、Vc分別為三相端壓;R為三相繞組電阻;L為三相繞組電感;Ea、Eb、Ec分別為電動機的三相感應電勢;ia、ib、ic分別為三相繞組流過的電流。這樣,其電磁轉矩的表達式可以表示為:
而根據運動學定律。電磁轉矩的表達式也可以表示為:
![]()
式中,T1為電動機的負載轉矩,J為轉子的轉動慣量,Z為電機轉動的阻尼系數。
2 系統硬件設計
2.1 系統總體硬件設計
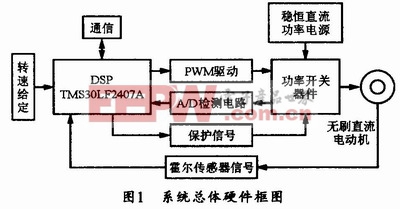
本系統大致可分為功率驅動部分、DSP控制核心部分、A/D信號檢測部分等,圖1所示是一個基于DSP的直流無刷電機控制系統的總體硬件系統框圖。
2.2 功率驅動部分設計
圖2所示是本文所介紹的三相無刷直流電機的功率變換橋路電路圖。圖中共使用了6個N溝道的MOSFET功率元件IRF540,可構成三相橋路以作為無刷直流電機的電子換相器,其完成的功能與傳統的有刷直流電機的換相器的功能一致。電阻R107作為過電流保護功能的采樣電阻。其實是一個小型的錳銅分流器,取值0.01Ω,可保證平時在正常工作電流以及額定啟動電流通過電阻時,不會產生大的電壓,而當電機堵轉、某處短路或者上下MOSFET同時導通短路時,該電阻則可產生大電流,當在此電阻上的壓降達到一定程度時,電路可迅速激活過電流保護電路以停止所有MOSFET的工作,同時斷開主電路電源,防止事態進一步惡化。









評論