基于Elmo數字伺服控制器的機載吊艙陀螺穩定平臺設計

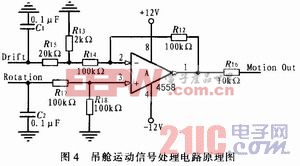
2.2.3 吊艙運動信號處理電路
吊艙系統除了要實現基本的陀螺穩定功能外,還必須具備巡航、跟蹤等功能。因此,整個吊艙系統還有轉動信號、漂移信號的處理電路。這兩個信號是通過控制面板(HCU)上相應的開關按鈕來控制。圖4為吊艙運動信號處理電路原理圖。
2.3 系統軟件設計
Elmo Whistle數字化智能驅動器的軟件結構總體可分為2大部分:1)驅動器本身的程序,這個包括引導程序,固件和個性化的設置。這些程序可以通過官方網站下載,然后根據特定的驅動器型號進行燒錄;2)用戶自己的程序,以實現用戶自行設計的功能。
在本系統軟件設計中,主要完成陀螺穩定的功能。通過采集Elmo Whistle控制器的模擬輸入口由光纖陀螺反饋回來的電壓信號AN[1],在程序設定相應的跟隨比例AG[2],實現相應的陀螺穩定功能。這里的關鍵是參數AG[2]的確定。這個參數首先有一個估算的過程,估算完成后,可以在稍后的調試環節中進行微調,最終實現精準的陀螺穩定功能。參數AG[2]可以按以下方法估算:
1)在Smart Terminal界面中,將輸入AN[1]設定為1 V,測量此時吊艙的轉速,設為N,并在Smart Terminal界面中查看電機的轉速為S1,單位為count/s;
2)光纖陀螺最大感應輸出電壓為2.5 V,此時對應吊艙的速度應為M,M的值在吊艙設計時已經設定,為60(°)/s;此時電機的轉速為S2,則S2的值為:S2=(60/N)xS1;
3)比例因子AG[2]=S2/2.5;
Elmo Whistle內部有可調用函數,通過相應的設置語句,控制器就可以根據判斷6個數字輸入口的狀態,執行相應的內部函數。在本系統中,體現為LOCK信號功能、限位信號功能以及指示輸出等。圖5為陀螺穩定系統的部分軟件流程圖。

為了真正實現機載吊艙的數字化,在實現以上功能之外,本系統還就指令控制吊艙運動做了相應的嘗試。在原有的軟件模塊中,通過判斷輸入口3的狀態.增加了一個串口通信模塊。如果檢測到控制器數字輸入口3為低電平,則觸發串口通信模塊子程序,向控制器發送控制狀態字,實現指令控制吊艙功能。當然,這個功能也可以通過PC機向控制器發送相應的指令實現。
3 結束語
配合Elmo公司的Studio界面和Recorder軟件,可以分析機載吊艙陀螺穩定平臺是否達到技術指標要求,并且在有必要的時候修改系統硬件電路設計和程序中的參數,以達到預期的目標。
本系統最終設計出的機載吊艙陀螺穩定平臺,應用于目前的吊艙系統中,吊艙的穩定性能達到50μrad,俯仰轉動角度為-120°~+15°,方位轉動角度為360°連續,最大轉動速度為60(°)/s最大轉動加速度200(°)/S2,功耗小于240 W。

伺服電機相關文章:伺服電機工作原理















評論