基于TMS320F2812的太陽跟蹤器設計

2.2 主要控制軟件設計
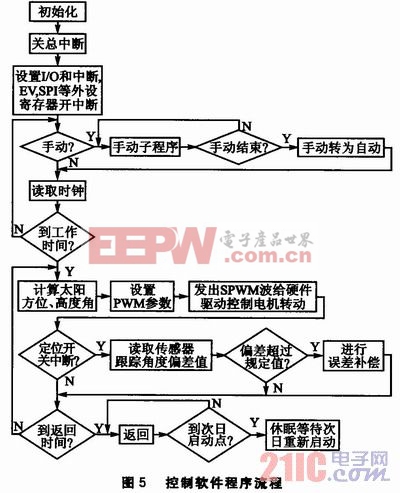
系統在正常工作時,每天從定位開關處開始自動運行,晚上返回定位開關處。啟動和返回時間由太陽高度決定。在完成一周期(即一天)的跟蹤后由時鐘電路的定時中斷信號進入休眠狀態,或定時由繼電器關閉總電源,減小系統功耗,待次日由定時中斷信號或值班電路給出信號喚醒處理器進入下一周期工作。控制軟件程序流程如圖5所示。
3 實際效果與誤差分析
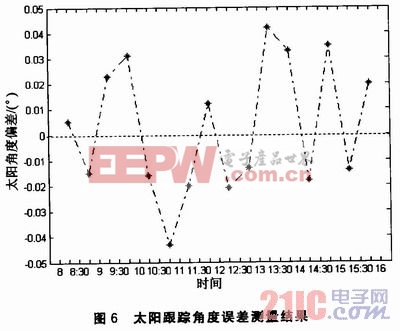
將設計的太陽跟蹤器應用在太陽能發電中。從2010年4月某天早上8:00工作至下午17:00,典型誤差測量結果如圖6所示。由于機械結構和傳動機構等的誤差,以及外界不確定環境(如大風等)的影響,跟蹤角度存在無規律性誤差,但總體來說誤差可以控制在±O.05°之內。
實踐運行情況表明,太陽跟蹤器實現了高精度跟蹤,年平均發電量比固定式高了20%~40%,比普通單軸式高出約25%。可見,該設計方案能夠使光伏發電效率大大提高。
結語
本文對光伏發電系統中太陽跟蹤器的跟蹤原理進行了研究,闡述了基于TMS320F2812的太陽跟蹤器的軟硬件設計方法。采用該設計方案后,跟蹤精度高,成本相對較低,便于操作,性能穩定可靠,大大提高了光伏發電效率,具有較高的實用價值。
本文引用地址:http://www.104case.com/article/162501.htm








評論