永磁同步電機控制系統的串行通信實現

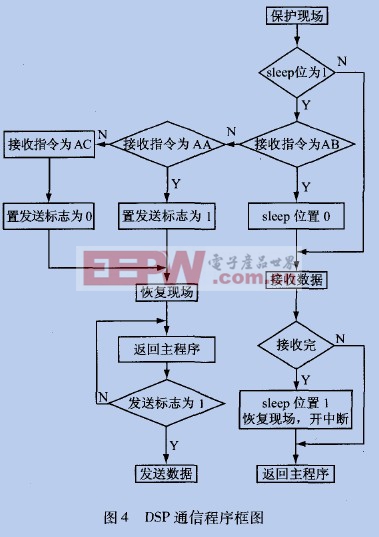
TMS320LF2407中包含一個串行通信模塊(SCI),SCI的寄存器是8位的。可編程的SC1支持CPU和其他使用標準非歸零(NRZ)格式的異步外設之間的串行數字通信,SCI的接收器和發送器是雙緩沖的,每個都有它自己的獨立使能和中斷位。波特率可以通過一個16位的波特率選擇寄存器進行編程 。為了保證串行通信的成功,在通信前必須對DSP的SCI模塊進行初始化,設置通信的波特率、奇偶校驗、停止位及每個字節包含的位數等,這些參數的設置必須與PC機上的設置一致,否則會引起傳輸錯誤。在DSP與PC機的通信中,對于DSP來說,通信的主要功能是接收Pc機傳來的數據和發送數據給Pc機。可采用查詢和中斷兩種方式接收數據,查詢方式需要程序循環檢測通信端口,浪費DSP資源,因此本系統接收數據時采用中斷方式;但在發送數據時由于要發送的數據比較多,如果也用中斷方式就會干擾到電機的控制,電機不能平穩運行,因此采用查詢方式。在中斷子程序中設置發送標志位,通過在主程序中查詢該標志位來決定是否發送數據。在發送數據過程中,下位機需要發送多組數據,每組數據對應不同的電機參數,如何正確區分這些數據是通信能否成功的關鍵。本系統利用已設定的下位機發送參數的順序、MSComm控件的inputlen屬性及rthreshold屬性的配合使用來解決這個問題。另外下位機接收和發送寄存器是8 位的,需要設定標志變量來區分、合并高低字節。圖4為下位機通信程序框圖。
本文引用地址:http://www.104case.com/article/162475.htm
3 試驗結果
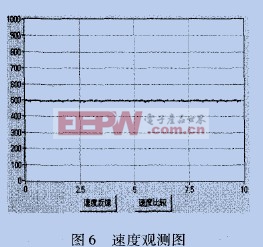
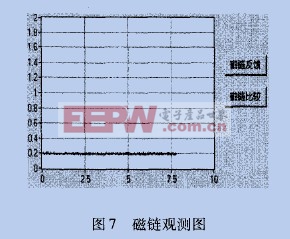
利用DSP的SCI模塊和MSComm控件可以方便地實現DSP與Pc機的串行通信。本文所介紹的設計方法已在Pc機和以TMS320LF2407為核心的直接轉矩控制系統試驗平臺上進行了驗證,結果表明:可以通過Pc機對永磁同步電機進行控制。圖5為上位機監控界面,它包括參數發送和數據采集兩部分,可以顯示速度、磁鏈、轉矩的給定值和實際值,便于用戶比較。圖6為永磁同步電機空載運行時的速度觀測圖。其中:直線代表速度給定值,曲線是速度實際值。速度給定值為500 r/min,通過轉速表測量,轉速為499r/min,從圖中可以看出速度以極小的誤差圍繞給定值波動,證明了轉速能被很好地控制住。圖7為磁鏈標幺值的給定值與實際值比較圖,磁鏈給定值為200,DSP中采用Q12格式,最后經過計算反饋到上位機時應為0.2,直線是給定值,曲線是實際值,在圖中可以看出超調量很小,磁鏈參數也能準確地反饋到Pc機上,與試驗預期結果相符。
4 結 語
采用PC機與DSP的主從式結構,既能發揮DSP的數據處理能力,又具有良好的人機接口,這極大地方便了系統的開發調試。DSP和PC機串行通信可以實現下位機參數實時上傳,使用戶隨時掌握電機狀態性能;通過上位機在線修改DSP的程序,使電機按照要求運行,實現對電機的全數字化實時控制。本文所解決的關鍵難題為下一步實現電機控制系統性能的在線監測奠定了基礎。















評論