對交通信號燈模糊控制的自主創新性設計

4 仿真研究
為了驗證新型兩級模糊控制器的控制效果,用Matlab結合VB編寫了新型兩級模糊控制的仿真程序,并與當前廣泛運用的感應控制和定時控制進行了比較。假定路口各方向車輛到達交叉口是隨機的且服從均勻分布,利用VB中的隨機函數產生12個方向車流每秒鐘到達的車輛數,到達率為0~0.4輛/s,設某車流紅燈轉變為綠燈后車輛以1輛/s的速率離開等候的車隊,以通過交叉口的平均車輛延誤作為評價指標。分別對新型模糊控制、感應控制和定時控制在不同的交通條件下各進行10次仿真比較,每次仿真時間均為1 200 s,10次仿真的平均結果如表3所示。

從仿真結果表3中可知,采用新型兩級模糊控制方法從整體控制效果上看,在平均車輛延誤上比感應控制方法提高了13.290 8%,比定時控制方法提高了22.820 1%,可見優勢明顯。
5 動態模擬演示
為了使其更具可觀性與實用性,更易于運用到交通現場,我們還對新型兩級模糊控制進行了動態模擬演示。其動態模擬演示圖如圖6所示。
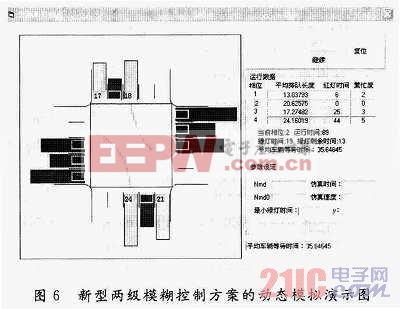
可以對交通參數進行隨意設定從而實現不同情況下的動態模擬,在演示圖中可以通過繁忙度知道下一綠燈相位應為何相位,通過當前相位可以知道正處于綠燈的相位,且由綠燈時間可知整個相位的總綠燈時間,由綠燈剩余時間可以準確的知道其剩余綠燈時間。這樣就使新方案更具可觀性與實用性。對于實際交通流時,只需把檢測到的實時數據輸入,通過新型兩級模糊控制器就可以實現實時在線控制了。
6 結語
本文確定當前相對最優的交叉口平面幾何設計與相位設計,并設計出一種更適用于實際情況的新型兩級模糊控制方案。另外,利用Mat-lab軟件和VB編程軟件對新方案進行了仿真比較,驗證了新方案的有效性和優越性,同時還對其進行了動態模擬演示,使其更具可觀性與真實性,更易于運用到交通現場。該新方案實用性強、易于推廣、利于環保。只需在現有的交通控制系統中把新型控制程序輸入其交通控制的微型計算機中,即可實現其實時在線控制,充分發揮了計算機的高速處理與計算能力。也大大降低了交通信號設備的改造費用,具有可觀的經濟效益。同時,交通流的通暢、車輛排隊時間的縮短能有效地減少汽車尾氣的排放量,更能適應當前全球的低碳經濟計劃。



評論