基于重復控制的全數字UPS逆變器

1)z-N:周期延時環節,延時一個基波周期(工頻周期),使周期誤差從下一個周期開始校正,同時使超前環節的設置成為可能。
2)Q(z):為克服對象模型不精確,增強系統的穩定性而設置的低通濾波器或小于1的常數。
3)S(z):補償器,用于修正SPWM逆變器模型的幅頻特性曲線,使之適合重復控制的要求。
4)zK:時間超前環節,補償由于S(z)和SPWM逆變器產生的時間延遲。
5)Kr:重復控制器的增益,決定了重復控制器的輸出Ur的幅度,同時Kr的取值直接影響了重復控制器的穩定性,一般取一個小于1的常數,以保證系統的穩定。
6)P(z):SPWM逆變器的簡化離散數學模型。
令:
H(z)=Q(z)-P(z)KrS(z)zk (2)
對應于頻域的表達式為:
H(ejωTs)=Q(ejωTs)-ejωkTsKrS(ejωTs)P(ejωTs) (3)
很明顯,閉環系統穩定的充要條件是[4]:
|H(ejωTs)|1 (4)
Q(ejωTs)通常是一個接近于1的常數,或者是一個低通濾波器。在重復控制器的作用下,逆變器的輸出電壓的諧波幅度由下式決定:
|e(ejωTs)|=![]() |r(ejωTs)|+
|r(ejωTs)|+![]() |d(ejωTs)| (5)
|d(ejωTs)| (5)
從上式可以看出,穩定狀態下,參考跟蹤誤差|r(ejωTs)|和重復控制中的周期性擾動誤差|d(ejωTs)|被衰減到原來的![]() 倍。因此,
倍。因此,![]() 反映了重復控制系統的諧波抑制能力,定義它為諧波抑制因子。
反映了重復控制系統的諧波抑制能力,定義它為諧波抑制因子。
4 重復控制器的設計
重復控制器的設計首先要保證系統的穩定性,然后才是考慮如何減小系統的穩態誤差,抑制逆變器輸出電壓的諧波[5]。在UPS系統中,輸出電壓的諧波主要集中在中低頻段,因此在進行重復控制器的設計時,只考慮中低頻段系統的諧波抑制,在系統的穩定性分析時兼顧高頻段即可。下面給出了一種重復控制器的設計方法:
1)確定周期延時系數N
輸出電壓的采樣周期為Ts,則一個周期內的采樣次數即延時系數N=T/Ts。
2)逆變器的簡化離散數學模型P(z)
逆變器的數學模型可以有兩種方法,第一種是實驗的方法[5]描出逆變器的幅頻特性曲線,通過軟件擬合后得到模型。另一種是忽略開關器件,只考慮LC濾波器和寄生電阻的二階模型。
3)補償環節Q(z)
前面已經提到,Q(z)通常是一個接近于1的常數,或者是一個低通濾波器,設計中取Q(z)=0.95。
4)逆變器模型幅頻特性補償器S(z)
S(z)實際上是由S1(z)和S2(z)復合而成的。由于逆變器的LC濾波器在諧振頻率點上增益很大(如果沒有阻尼,則為無窮大),通過S(z)的補償,希望頻率從0到諧振點的增益接近于0dB,通過諧振點之后,增益大大減小。S1(z)通常采用梳狀濾波器,這樣沒有相位延遲。S2(z)通常采用一個剪切頻率等于LC諧振頻率的二階低通濾波器,通常可借助MATLAB進行設計。
5 復合控制方法
UPS逆變器采用重復控制技術,在線性和非線性負載下均可以獲得良好的靜態特性,但是由于重復控制延時1個工頻周期的控制特點,使得單獨使用重復控制的UPS逆變器動態特性極差,基本上無法滿足UPS逆變器的各項指標,因此本文提出了雙環PI控制和重復控制相結合的復合控制方法。圖4是這種復合控制方法的結構框圖。圖中左上角虛線框內的控制器為離散重復控制器,主要用來消除輸出電壓周期性的跟蹤誤差,減小UPS逆變器在整流橋負載下的輸出電壓畸變。雙環PI控制器主要是對輸出電壓跟蹤誤差進行實時的控制,減小不確定的干擾造成的輸出電壓畸變。
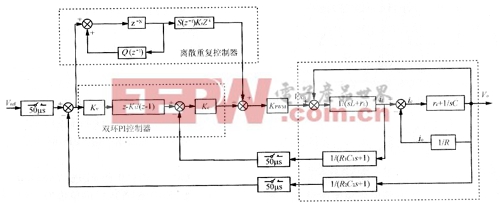
圖4 雙環PI和重復控制的復合控制框圖
上述復合控制的結構實際上是一種并聯的結構,重復控制器的輸入為電壓誤差信號,輸出為電壓控制信號;雙環PI控制器的輸入為電壓誤差信號和電感電流信號,雙環控制器的輸出和重復控制器的輸出相加之后再輸入比較器,產生逆變橋的門極脈沖。兩種控制方法的結合,一方面,當系統處在穩態時,重復控制器起主要的調節作用,使得穩態下輸出電壓能很好地跟蹤參考正弦波。另一方面,當系統出現比較大的瞬態干擾時,雙環PI控制會起到比較大的作用,調節輸出電壓,使跟蹤誤差迅速減小。
圖5為MATLAB的SIMULINK工具箱下的仿真結果,圖5(a)為雙環控制,圖5(b)復合控制。可以很明顯得看到,采用復合控制的UPS逆變器的輸出波形的畸變已經變得很小。

(a)雙環控制






評論