基于加速度回路的天線隨動系統控制器設計

系統選取Cyclone系列的EP1C6T144FPGA芯片來實現對DSP和ADS8364各個功能引腳邏輯的靈活控制。作為系統前端數據采集的核心,選取TI公司的ADS8364芯片完成速率陀螺和電位計的信號采集工作。此外,為了保證信號的穩定性,在A/D前端加入射頻電路芯片LM310。
系統采用PWM工作方式驅動直流力矩電機,由TMS320F2812產生PWM控制波形,然后由PWM功放MSK4201進行功率驅動,產生力矩電機所需要的驅動電流。MSK4201是一款完整的H橋電路,它可以用來驅動DC有刷電機或作為D類開關放大器,所有的高低驅動控制電路在內部集成,用戶提供TTL兼容PWM信號,同時振幅和方向控制四象限模式,內部驅動電路提供適當的死區時間來保護每個半橋,全N溝道場效應管意味著兩方面的阻力和交換能力效率的最佳模式。
同時,為了保證PWM驅動電路與DSP電路的之間的干擾減至最小,在系統設計中,采用光耦隔離芯片6N137將二者隔離。
系統與上位機的通信采取異步串行通信方式,RS 422接口芯片采用DS8921。同時采用SN74ALVTHl6245芯片避免回流,提高數據傳輸的穩定性。
3.2 系統軟件實現
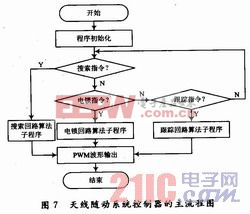
本系統采用數字PID控制算法,由TMS320F2812的事件管理器(EV)產生周期為0.1 ms的PWM波形信號,同時采用CPU定時器以1 ms的控制周期,控制驅動力矩電機實現天線轉動。系統首先對DSP內部時鐘模塊、PIE模塊、SCI模塊、事件管理器等模塊進行初始化,之后啟動SCI模塊,通過指定的通信協議,等待接收上位機的命令。當上位機發出啟動伺服命令后,電機上電,控制天線保持零位電鎖狀態;當上位機發出搜索命令時,進入搜索回路子程序,天線從零點開始進行步進式搜索,當被動雷達天線發現到目標后,程序切換到跟蹤回路子程序,由雷達數字接收機給定實時誤差角信號,使天線進入目標跟蹤狀態。若目標丟失,則天線立即切換到搜索狀態重新進行目標搜索。天線隨動系統控制器的主流程圖如圖7所示。本文引用地址:http://www.104case.com/article/162203.htm
4 實驗結果分析
實驗以方位通道為例,對天線轉動過程中的電位計采樣數據整理分析如下,圖8為角加速度回路引入系統前后對比曲線,通過比較可知,二者均是天線由0°轉到20°的數據曲線,響應速度快、動態性能較好,沒有明顯的超調現象,總體輸出良好。但是圖8(a)表現出系統
存在一定的高頻振蕩,圖8(b)表現出系統在引入角加速度回路負反饋后,隨動系統的整體性能得到了很好的改善,抑制了尖峰干擾,數據輸出曲線更加平滑,系統性能更加可靠。
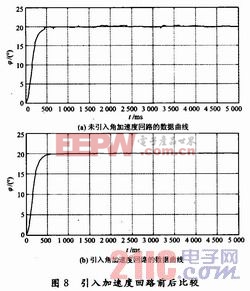
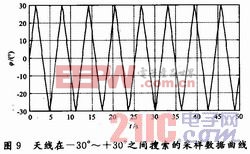
圖9為天線在-30°~+30°范圍內搜索的數據曲線,搜索曲線平穩連續,表明天線能夠較好地實現步進式搜索。
5 結論
通過理論分析和硬件驗證,所設計的基于加速度回路的天線隨動系統具有精度高、穩定性好、結構簡單等特點,引入角加速度回路后,可以很好地改善系統的跟蹤精度,同時能夠很好地抑制天線隨動系統普遍存在的震顫現象,提高系統的穩定性,是一種高精度、弱耦合、抗目標丟失、快速平穩、可實現比例導引的隨動系統。











評論