基于加速度回路的天線隨動系統(tǒng)控制器設(shè)計

2.2.5 跟蹤特性
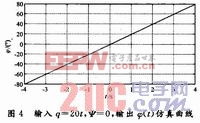
圖4給出了當(dāng)輸入q=20t,ψ=0時,輸出φ(t)的仿真曲線。它表明,當(dāng)輸入20°/s的角速度信號時,跟蹤回路能較好地復(fù)現(xiàn)系統(tǒng)的輸入信號,即電軸可以穩(wěn)定跟蹤視線角,實現(xiàn)高精度跟蹤。同時可以看出,φ的輸出在過零點時,特性良好,無死區(qū)現(xiàn)象。本文引用地址:http://www.104case.com/article/162203.htm
2.2.6 引入加速度回路特性
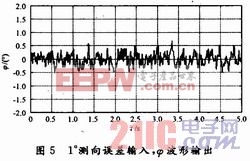
在天線隨動系統(tǒng)中增加的角加速度負(fù)反饋回路,不但可以用于抑制系統(tǒng)的高頻振蕩,解決隨動系統(tǒng)的顫振問題,而且能克服慣性平臺的“航向效應(yīng)”,提高了電機參數(shù)的魯棒性,使平臺式隨動系統(tǒng)的性能更加可靠。圖5給出了輸入標(biāo)準(zhǔn)差為σi=0.33時,取Kc2=1.2,加速度回路起反饋作用,輸出標(biāo)準(zhǔn)差σo=0.21。它表明天線隨動系統(tǒng)的φ角度輸出得到平滑。取Kc2=0,加速度回路不起反饋作用時,輸出標(biāo)準(zhǔn)差σo= 0.23。可見,加入加速度反饋回路可以進(jìn)一步降低φ的輸出振蕩。
3 系統(tǒng)實現(xiàn)
3.1 系統(tǒng)硬件實現(xiàn)
本系統(tǒng)是采用以DSP為核心控制芯片的數(shù)字控制系統(tǒng),通過天線隨動系統(tǒng),對采取的控制方案的性能進(jìn)行實測驗證。考慮到在天線隨動系統(tǒng)中,天線的負(fù)載大,擾動負(fù)載力矩較大,系統(tǒng)選用永磁式直流力矩電機,它是一種低轉(zhuǎn)速、大力矩的直流電動機,可以直接帶動低速負(fù)載和大轉(zhuǎn)矩負(fù)載,具有轉(zhuǎn)速和轉(zhuǎn)矩波動小,機械特性和調(diào)節(jié)特性線性度好等優(yōu)點,根據(jù)給定的參數(shù),選取力矩電機的堵轉(zhuǎn)轉(zhuǎn)矩為3.7 N·m,電氣時延為T≤0.93 ms。測角電位計選用精密塑料電位計MidoriCPP-35型,有效電氣角為340°,速率陀螺選用單自由度液浮陀螺JST-1,它具有漂移小,零位及重復(fù)性好,頻率寬的特點。
隨動系統(tǒng)控制器的硬件結(jié)構(gòu)主要包括A/D采樣電路模塊、DSP和FPGA控制電路模塊、PWM功率驅(qū)動電路、SCI串口通信電路、供電電源等模塊。系統(tǒng)硬件結(jié)構(gòu)如圖6所示。
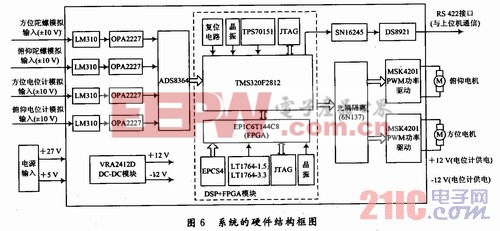
系統(tǒng)以TI公司生產(chǎn)的TMS320F2812芯片為核心處理器,主要完成速率陀螺模擬信號采集、電位計模擬信號采集、PWM信號產(chǎn)生、數(shù)字PID控制算法、搜索回路算法、跟蹤回路算法、與上位機的RS 422接口串行通信的實現(xiàn)以及系統(tǒng)工作狀態(tài)的轉(zhuǎn)換等功能。











評論