ESP904在ROV控制體系中的應用

傳統的水下機器人內部數據通信系統是基于串行總線的通訊系統。但是, 隨著近年來以太網技術的快速發展, 特別是高速以太網技術的發展, 極大地減少了數據在網絡傳輸上的延遲, 而工業以太網交換機能夠把控制網絡分成若干個相互獨立的沖突域, 故可避免不同沖突域之間的節點因競爭線路而發生碰撞, 從而提高了數據在網絡中傳輸的可靠性和穩定性。因此, 在工業控制中, 越來越多的傳統現場總線控制網絡被工業以太網所代替, 并已發展成為一個技術趨勢。為此, 本文的HYSUB130 -4000 ROV (ROV, RemotelyOperated Vehicle) 系統在遙控水下機器人控制系統中也采用了光纖以太網通訊體系結構。
HYSUB130-4000 ROV系統除了較多的控制計算機接入到以太網網絡體系中外, 還有很多嵌入式控制模塊, 這些模塊只能提供串口通訊模式。為了能將這些嵌入式控制模塊接入到遙控水下機器人的以太網控制系統中, 本系統在開發過程中采用了以太網串口服務器ESP904, 它的串口轉以太網性能可以很好的解決這個問題。
HYSUB130-4000ROV系統的以太網控制體系如圖2所示。
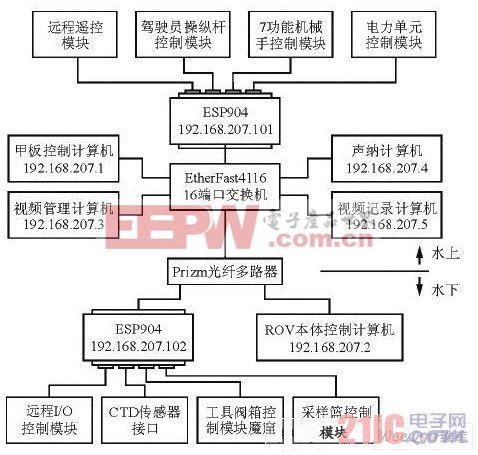
圖2 ROV系統的以太網控制體系
本系統中的甲板控制計算機和ROV本體控制計算機是ROV控制系統里的主控制計算機, 是ROV系統的大腦和“指揮中心”, 其他計算機用于輔助管理視頻、導航數據、切換控制等操作。
4 小結
由于遙控水下機器人控制系統的慣性較大,其控制周期接近于秒級, 因此, 通過實踐證明,以太網數據傳輸能夠很好的滿足遙控水下機器人控制體系的控制性能, 而且可以通過交換機擴展以太網串口服務器, 同時在理論上還可以擴展任意多串口設備, 因而可以使更多設備通過網絡進行通訊, 并為設備的擴展提供了更大的接口空間。
除此之外, HYSUB130-4000ROV系統還采用了ESP904以太網串口服務器來將眾多嵌入式控制模塊接入以太網。甲板串口服務器ESP904連接ROV本體遠程控制模塊、駕駛員操縱桿控制模塊、7功能機械手操縱桿控制模塊和電源分配單元控制模塊, 它們通過RS-485總線連接到ESP904服務器的串行端口。水下ROV本體串口服務器ESP904連接CTD傳感器、遠程I/O控制模塊、采樣藍控制模塊和工具閥箱控制模塊, 它們分別根據需要通過RS-232或者RS-485總線連接到ESP904的串行端口上, 這樣就可以使以太網控制系統中的任何一臺計算機都通過以太網像訪問真正的串口設備一樣去訪問分別連接到ESP904串口服務器上的設備。









評論