基于ARM7的物流系統(tǒng)自動(dòng)引導(dǎo)小車控制系統(tǒng)設(shè)計(jì)

摘要:電子技術(shù)的發(fā)展帶動(dòng)機(jī)電產(chǎn)品向智能化、人性化的方向發(fā)展。本系統(tǒng)采用嵌入式系統(tǒng)以ARM7為遠(yuǎn)程自動(dòng)引導(dǎo)小車(AGV)控制核心,結(jié)合GPRS和WIFI無線網(wǎng)絡(luò),實(shí)現(xiàn)自動(dòng)引導(dǎo)小車(AGV)遠(yuǎn)程控制和工作環(huán)境實(shí)時(shí)監(jiān)控。安裝相應(yīng)的感應(yīng)結(jié)構(gòu),可以實(shí)現(xiàn)貨物的搬運(yùn)工作,實(shí)現(xiàn)物流系統(tǒng)中貨物搬運(yùn)工作智能化。
關(guān)鍵詞:嵌入式系統(tǒng);ARM7;自動(dòng)引導(dǎo)小車;物流系統(tǒng)
1 總體方案設(shè)計(jì)
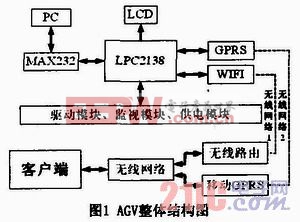
物流系統(tǒng)自動(dòng)引導(dǎo)小車(AGV)控制系統(tǒng)由AGV智能控制模塊、監(jiān)視模塊、及無線網(wǎng)絡(luò)通訊模塊等三大部分組成。工作過程是通過接入互聯(lián)網(wǎng)的手機(jī)或者微型計(jì)算機(jī)客戶端通過無線網(wǎng)絡(luò)向遠(yuǎn)程的AGV發(fā)送控制指令代碼,期間傳輸信號由發(fā)送端使用加密狗加密。當(dāng)信號經(jīng)互聯(lián)網(wǎng)發(fā)送到接收終端時(shí),AGV網(wǎng)絡(luò)模塊把接受的指令傳送到處理器,處理器指示驅(qū)動(dòng)模塊驅(qū)動(dòng)AGV執(zhí)行動(dòng)作。運(yùn)動(dòng)的同時(shí)監(jiān)視模塊把采集到的圖像通過無線互聯(lián)網(wǎng)傳輸?shù)娇蛻魴C(jī)端,其整體結(jié)構(gòu)如圖1所示。
1.1 智能控制模塊
本部分是AGv的核心部分。采用的是嵌入式系統(tǒng)設(shè)計(jì),可以準(zhǔn)確高效地運(yùn)行及處理數(shù)據(jù)。控制器通過網(wǎng)絡(luò)組件WIFI或者GPRS與外部網(wǎng)絡(luò)進(jìn)行數(shù)據(jù)通訊,用戶可以使用家用寬帶網(wǎng)絡(luò)或者手機(jī)短信的方式實(shí)現(xiàn)模塊的遠(yuǎn)程控制。同時(shí)在本地控制還可以應(yīng)用紅外無線鍵盤、數(shù)字液晶屏來提供本地人機(jī)交互界面。
1.2 網(wǎng)絡(luò)模塊
AGV無線網(wǎng)絡(luò)通訊模塊是AGV通訊信號傳輸?shù)闹匾M成部分,由WIFI或者GPRS模塊來實(shí)現(xiàn)通訊。通訊中介是家用無線路由或者移動(dòng)網(wǎng)絡(luò)GPRS。
1.3 監(jiān)視模塊
AGV監(jiān)視模塊通過單片機(jī)驅(qū)動(dòng)舵機(jī)實(shí)現(xiàn)全方位的監(jiān)視。視頻信號通過攝像頭來采集,信號轉(zhuǎn)換后將視頻的PAL信號傳輸至處理器,經(jīng)無線網(wǎng)絡(luò)傳輸實(shí)時(shí)傳到客戶端。攝像頭的控制與智能控制模塊連接,攝像頭的運(yùn)動(dòng)受控制模塊的控制。
1.4 驅(qū)動(dòng)模塊
AGV驅(qū)動(dòng)模塊是通過可編碼的直流電機(jī)來驅(qū)動(dòng)的。當(dāng)處理器接收到客戶端傳來的指令,處理器對驅(qū)動(dòng)模塊信號處理。從而實(shí)現(xiàn)AGV的全方位的移動(dòng)。
2 系統(tǒng)硬件設(shè)計(jì)
本文采用的是PHILIPS單片32位ARM微控制器LPC2138,作為控制器的處理器,負(fù)責(zé)和WIFI、GPRS無線通訊模塊、監(jiān)視模塊、數(shù)據(jù)存儲(chǔ)、鍵盤、紅外、顯示屏等模塊進(jìn)行數(shù)據(jù)通訊和對無線網(wǎng)絡(luò)客戶端發(fā)送的信號進(jìn)行采集和處理。
2.1 控制核心模塊
ARM外圍電路包括電源鍵盤顯示屏、SD卡、SDRAM以及與各個(gè)輔助模塊進(jìn)行連接的擴(kuò)展接口等。ARM處理器內(nèi)嵌512k FLASH、32k的可讀寫RAM。電路中SDRAM芯片選用hy57v25641,存儲(chǔ)容量為16M。用其做系統(tǒng)運(yùn)行所需內(nèi)存,為操作系統(tǒng)信號的采集和數(shù)據(jù)的處理提供了可靠的運(yùn)行空間。擴(kuò)展的接口有串口、USB接口。串口為下載程序和與GPRS模塊通訊用,USB接口用于與WIFI連接從而接入無線互聯(lián)網(wǎng)絡(luò)。LCD顯示屏主要與鍵盤配合完成本地人機(jī)交互界面,LCD液晶240×320像素,65k色,驅(qū)動(dòng)芯片是ili9325。鍵盤采用的是PS2接口方便使用電腦鍵盤,與LCD合力完成本地人機(jī)信息交換。串口通過MAX232與上位機(jī)進(jìn)行通信,輔助單片機(jī)的下載通過ISP下載,支持在線調(diào)試。
2.2 外圍網(wǎng)絡(luò)模塊
WIFI和GPRS模塊用于實(shí)現(xiàn)處理器與客戶端的通信連接。WIFI模塊采用的是wfS000-u USB WIFI模塊。GPRS模塊采用的是BENQ M22A模塊。各通訊模塊外圍電路主要有:電源部分、工作指示及數(shù)據(jù)連接擴(kuò)展口組成。









評論