基于Beckhoff嵌入式PC控制器的步進電機群控系統設計

(3)在PLC Configuration 中導入程序,實現程序中的軸控制參數與硬件控制器的對應,對應結果如圖3所示。
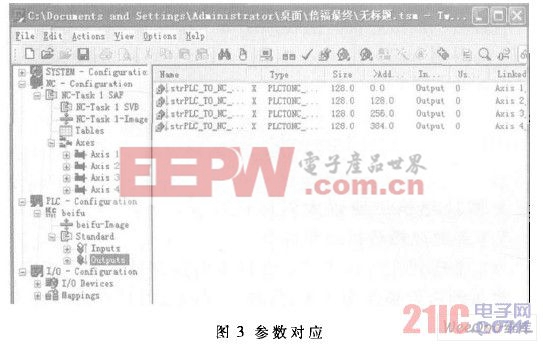
(4)將硬件配置和編好的程序下載到目標控制器,將系統設置為運行模式,然后通過改變各個MC模塊的參數,便可實現對電機的控制。
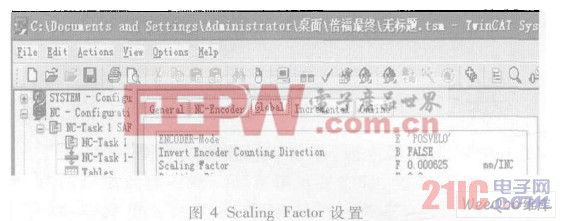
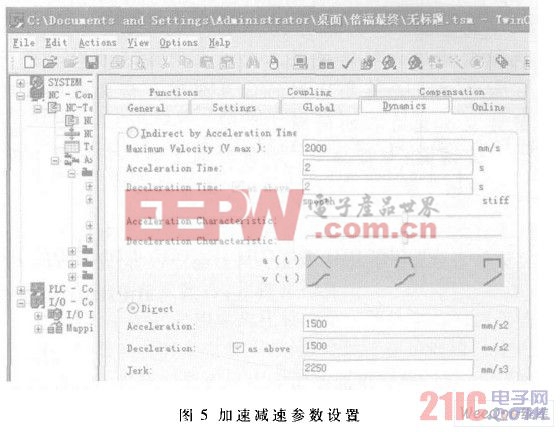
步進電機拖動設備的運動距離主要由電機的步距角、細分數及傳遞絲杠的螺距參數決定,通過這些參數計算出電機轉動運行圈數和設備運動距離的系數,然后將其填入Scaling Factor,便可在程序中直接指定設備的運行距離,由程序計算出電機執行所需的脈沖數。Scaling Factor設置如圖4所示。此外,為了保證步進電機運行的平穩性要求,啟動和加速時間、速度曲線也可設定載入控制器,以減少軟件編程,提高系統可靠性。加減速參數設置如圖5所示。
如若對步進電機的細分有明確要求,可通過編程改變控制器的參數或者通過Beckhoff公司提供的KS2000軟件對控制進行設置,實現電機的不同細分要求。
通過一系列實驗表明,本控制方案完全可以滿足系統所要求的技術指標,與使用PLC的控制方案和其他控制方式的多電機控制方案相比,具有以下特點:(1)采用高性能CPU及EtherCAT工業以太網通信等最新技術,可滿足高速、高精度要求;(2)系統開放性好,易于擴展;(3)系統拓撲結構簡單,與傳統控制方案相比較,控制器集成Ethernet接口和EtherCAT接口,輸出模塊直接驅動步進電機,大幅縮減了中間環節,系統可靠性高,電柜安裝尺寸大幅縮小,施工及維護簡單、方便;(4)所有產品均以總線連接,配置及診斷功能方便、強大;(5)控制器預裝Windows操作系統,可充分利用Windows操作系統帶來的優勢,如在控制器中直接使用VB、VC面向對象編程語言,數據庫系統以及Windows操作系統在組網上的優勢、各操作站之間的數據交換。










評論