基于ARM的電腦鼠走迷宮的研究

2.4 傳感器模塊
2.4.1 傳感器模塊組成
傳感器模塊采用紅外傳感器:紅外線發射對管SIR563ST3F和IRM8601S,紅外線收發對管IR204和PD204-6B。紅外線發射管SIR563ST3F最大輻射角約為30°,工作中心頻率38 kHz;紅外線接受管IRM8601S為一體式紅外線接收頭,最佳工作波長940 nm。可以通過設置不同的發射頻率來實現用一個紅外傳感器完成遠距和近距探測的功能。紅外線發射管IR204和紅外線接收管PD204-6B工作波長均為940 nm,它們固定在兩輪內側,并在輪內貼上黑白碼盤,碼盤隨車輪的轉動而轉動,當傳感器正對著碼盤黑色條紋時,輸出高電平,反之低電平。通過GPIO口中斷檢測電平變化,就可以計算并記錄電腦鼠行走的距離。
2.4.2 傳感器模塊功能
(1)路程檢測。由安裝在兩輪內側的紅外線收發管IR204和PD204-6B,對黑白碼盤條紋進行計數,按照迷宮單元的長度為單位進行路程計數,以記錄電腦鼠在迷宮中的方位坐標,同時還可以精確地實現轉彎。
(2)岔口檢測。岔口檢測由安裝在正前、左前、右前的3個紅外線發射對管SZR563ST3F和IRM8601S實現,工作波長940 nm,實現遠紅外測距功能,探測前、左、右有無障礙。
(3)姿勢修正。姿勢修正由左右2個紅外線發射對管SIR563ST3F和IRM8601S實現,發射信號約30.5 kHz,實現近紅外測距功能,保持電腦鼠在中軸線附近行走,避免撞擊迷宮。值得注意的是,在轉彎過程中不要進行姿勢修正,這樣有可能導致轉彎的角度出現偏差,即電腦鼠只是在前進的過程中才進行姿勢修正。
2.5 電機控制模塊
電機控制模塊主要負責控制電腦鼠的運動,包括電機和電機驅動電路兩部分。電機為兩個兩相四線制步進電機,工作電壓為7.4 V。電機驅動芯片采用BA6845FS,每個芯片包含2個H橋,它的最大驅動電流為1 A,且在輸入邏輯的控制下輸出有3種模式:正向、反向和停止。
3 電腦鼠軟件研究與實現
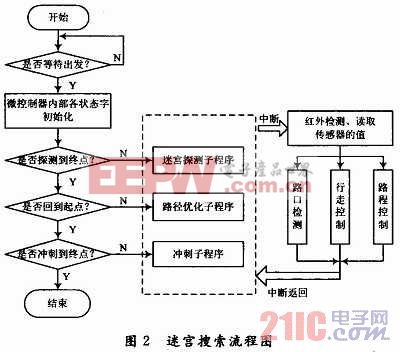
電腦鼠的軟件部分主要用來檢測迷宮環境,傳送控制信號給相應的硬件模塊,對在迷宮中行走的電腦鼠進行制導與導航。其主要由迷宮搜索主程序和其他實現各種功能的子程序組成,主程序主要起到搜索探測迷宮和決策功能,而其他各種功能則是通過調用其相應子程序來實現的,搜索流程如圖2所示。本文引用地址:http://www.104case.com/article/162073.htm










評論