基于模糊控制的閥門定位器設計

根據實際情況,采用最大隸屬度法進行解模糊判決。定義Kp,KI,KD參數的調整算式如下:
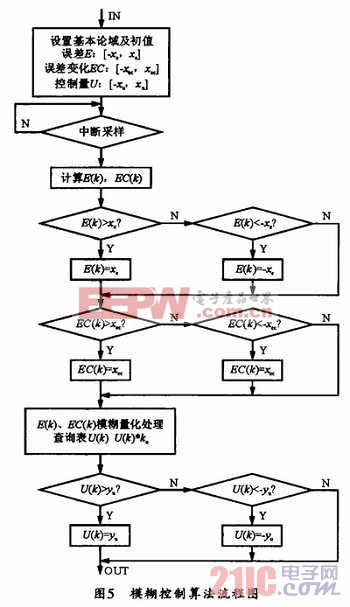
在線運行過程中,控制系統通過對模糊邏輯規則的結果處理,查表和運算,完成對PID參數的自校正,流程圖如圖5所示。其中:E:誤差,EC:誤差變化,U:控制量,kU:比例因子。本文引用地址:http://www.104case.com/article/161878.htm
3 結束語
本文主要討論了模糊控制算法在閥門定位器中的運用以及所用的微控制器和所涉及的外圍電路設計,在工程實踐中表明這些方法都是可行的。但是由于工業現場環境的干擾,控制精度有待進一步的提高,而且算法還是可以進一步優化,在后續的研究中,可以嘗試用神經網絡等控制方法進行更深入的研究。












評論