一種智能機器人系統設計和實現

4.3 智能巡線試驗
機器人的巡線可用于機器人比賽、自動化無人工廠、倉庫、服務機器人等領域,因此研究巡線實現過程有一定的現實意義。試驗如圖5所示。

實驗場地是綠色毛毯狀物質,其中白線寬度為30 mm。在啟動試驗平臺之前要調整攝像頭視角,如果視角太大,則循線精度很難保證,甚至會脫離預期的軌跡。經過試驗驗證,當攝像頭光軸與地面夾角大約為60°左右時,其循線可靠性及精度能夠得到很好的保證。
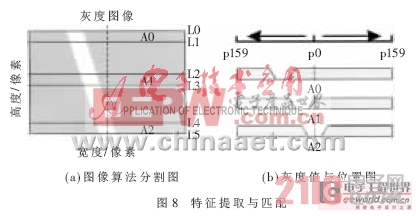
②把圖像分成三個圖像帶:A0,像素從L0~L1;A1,像素從L2~L3;A2,像素從L4~L5;再把每個帶分成左右兩半,其像素從中間開始向兩邊遞增,即從p0~p159,并分別給出權值,求其每點的灰度值與相應點權值并求出總和,其表達式為: Sj=V1*1+V2*2+…+Vi*i+…+Vn*n ③用Ai右邊區的總和減去Ai左邊區的總和的差值,看是否落在誤差的允許范圍[-δ,δ]之內,即表達式為: ④根據Tm值的大小就可以確定機器人的位置是左偏、右偏,或在誤差范圍之內,隨之就能產生機器人的控制策略。 實驗結果表明,本課題設計的機器人能夠很好地實現直線爬坡、巡線行走等功能,并可以實時采集聲音和圖像信息。在數據處理上,采用ARM9核的S3C2410處理器,數據處理快、實時性強、穩定可靠、效率高。移動機器人隨其應用環境和移動方式的不同,研究內容也有很大差別。其共同的基本技術有傳感器技術、移動技術、操作器、控制技術、人工智能等方面。它有相當于人的眼、耳、皮膚的視覺傳感器、聽覺傳感器和觸覺傳感器。移動機構有輪式(如四輪式、兩輪式、全方向式、履帶式)、足式(如 6足、4足、2足)、混合式(用輪子和足)、特殊式(如吸附式、軌道式、蛇式)等類型。輪子適于平坦的路面,足式移動機構適于山岳地帶和凹凸不平的環境。移動機器人的控制方式從遙控、監控向自治控制發展,綜合應用機器視覺、問題求解、專家系統等人工智能等技術研制自治型移動機器人。
(Vi為灰度值,i為權值;0≤n≤159,n為整數;L0≤j≤L1或L2≤j≤L3,j整數)
Tm=(Sj右-Sj左)∈[-δ,δ] (m=0、1、2)
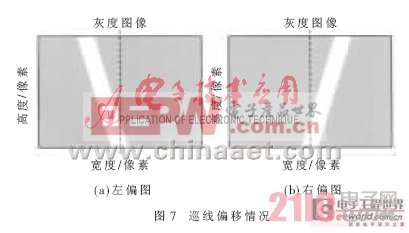
(1)控制算法描述:機器人的動態巡線過程,需要提取并能檢測判斷機器人相對白線的位置情況,形成控制策略,完成機器人的運動姿態調整。其算法實現流程如圖6所示,巡線偏移情況如圖7所示。 (2)特征匹配:圖像匹配技術是數字圖像處理領域中的一項重要研究,基本原理就是根據已知模式(模板圖),到另一幅圖中搜索相匹配的子圖像,該過程被稱為模板匹配。通常,圖像的模板匹配技術可以分成直接基于灰度值的方法以及基于特征提取的方法兩大類。 這兩種算法共同的缺陷是時間復雜度高,不利于實時操作,特別是在在線檢測、機器人視覺伺服等需要從大量視頻信號實現數字處理海量圖像的匹配場合。由于本課題采用的處理器S3C2410硬件不支持浮點運算,無法采用上述方法識別機器人相對于白線的位置是左偏還是右偏。為此,結合機器人應用環境的特殊情況,對二維圖像匹配算法進行了改進與簡化,其基本思路和實現過程如下: ①在現場采集一幅圖像,如圖8(a)所示(理想情況),大小為320×240像素。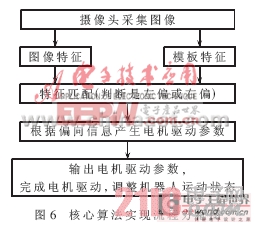








評論