一種智能機器人系統設計和實現

我們從廣泛意義上理解所謂的智能機器人,它給人的最深刻的印象是一個獨特的進行自我控制的活物.其實,這個自控活物的主要器官并沒有像真正的人那樣微妙而復雜。智能機器人具備形形色色的內部信息傳感器和外部信息傳感器,如視覺、聽覺、觸覺、嗅覺。除具有感受器外,它還有效應器,作為作用于周圍環境的手段。這就是筋肉,或稱自整步電動機,它們使手、腳、長鼻子、觸角等動起來。我們稱這種機器人為自控機器人,以便使它同前面談到的機器人區分開來。它是控制論產生的結果,控制論主張這樣的事實:生命和非生命有目的的行為在很多方面是一致的。正像一個智能機器人制造者所說的,機器人是一種系統的功能描述,這種系統過去只能從生命細胞生長的結果中得到,現在它們已經成了我們自己能夠制造的東西了
本文引用地址:http://www.104case.com/article/161868.htm嵌入式是一種專用的計算機系統,作為裝置或設備的一部分。通常,嵌入式系統是一個控制程序存儲在ROM中的嵌入式處理器控制板。事實上,所有帶有數字接口的設備,如手表、微波爐、錄像機、汽車等,都使用嵌入式系統,有些嵌入式系統還包含操作系統,但大多數嵌入式系統都是是由單個程序實現整個控制邏輯。嵌入式技術近年來得到了飛速的發展,但是嵌入式產業涉及的領域非常廣泛,彼此之間的特點也相當明顯。例如很多行業:手機、PDA、車載導航、工控、軍工、多媒體終端、網關、數字電視……
1 智能機器人系統機械平臺的搭建
智能機器人需要有一個無軌道型的移動機構,以適應諸如平地、臺階、墻壁、樓梯、坡道等不同的地理環境。它們的功能可以借助輪子、履帶、支腳、吸盤、氣墊等移動機構來完成。在運動過程中要對移動機構進行實時控制,這種控制不僅要包括有位置控制,而且還要有力度控制、位置與力度混合控制、伸縮率控制等。智能機器人的思考要素是三個要素中的關鍵,也是人們要賦予機器人必備的要素。思考要素包括有判斷、邏輯分析、理解等方面的智力活動。這些智力活動實質上是一個信息處理過程,而計算機則是完成這個處理過程的主要手段。
機器人前部為一四桿機構,使前輪能夠在一定范圍內調節其高度,主要功能是在機器人前部遇障礙時,前向連桿機構隨車輪上抬,而遇到下凹障礙時前車輪先下降著地,以減小震動,提高整機平穩性。在主體的左右兩側,分別配置了平行四邊形側向被動適應機構,該平行四邊形機構與主體之間通過鉸鏈與其相連接,是小車行進的主要動力來源。利用兩側平行四邊形可任意角度變形的特點,實現自適應各種障礙路面的效果。改變平行四邊形機構的角度,可使左右兩側車輪充分與地面接觸,使機器人的6個輪子受力盡量均勻,加強機器人對不同路面的適應能力,更加平穩地越過障礙,并且更好地保證整車的平衡性。主體機構主要起到支撐與連接機器人各個部分的作用,同時,整個機器人的控制系統就安裝在主體之中。后部機構與主體剛性連接,配備有電機驅動車輪,主要起支撐作用,并配合前輪實現轉向。
2 智能機器人控制系統硬件結構設計
2.1 控制系統總體硬件結構
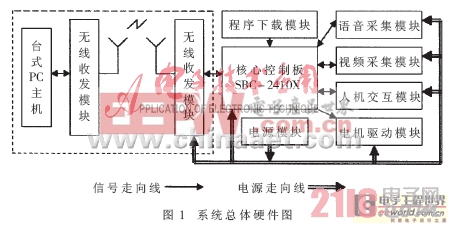
智能機器人控制系統的硬件系統方案設計如圖1所示。遠程監控端由臺式PC主機通過RS232或網絡接口連接無線收發模塊,完成圖像、語音的收集和顯示播放再現,監視現場機器人的周圍環境,必要時可以通過無線收發模塊發送控制命令,完成控制任務。由于研制的進度,本部分即虛線框內的功能正在開發,是今后研究的重點;現場機器人控制端由核心控制板模塊、視頻采集模塊、語音采集模塊、人機交互模塊、程序下載模塊、電機驅動模塊、電源模塊、無線收發模塊等組成。
2.2 語音視頻采集模塊
因為機器人需要收集周圍環境的信息,監聽周圍的情況,提供與圖像信息同步的語音信息,以便控制人員準確地掌握周圍所發生的情況,及時做出決策,所以設計了語音采集模塊以完成此項功能。本設計采用了Philips公司的UDA1341TS芯片與微處理器S3C2410相連,提供了完整的語音錄制和播放功能。S3C2410提供了IIS接口,能夠讀取IIS總線上的數據,同時也為FIFO數據提供DMA的傳輸模式,這樣能夠同時傳送和接收數據。在S3C2410處理器中,音頻數據的傳輸可以使用兩個DMA通道。如聲音播放,先將數據送到內存,然后傳到DMA控制器通道2,再通過IIS控制器寫入IIS總線并傳輸給音頻芯片,而通道1則主要用于錄音功能。
本系統采用基于CMOS圖像傳感器直接輸出數字信號的方案設計視頻采集模塊。此方案具有模塊簡單、外圍電路少、直接輸出數字信號、不用經過中間轉換就可以提供進一步的圖像處理的諸多特點。本課題選用C3188A攝像頭構成視頻采集模塊。C3188A是1/3″鏡頭的彩色數字輸出的攝像頭模塊,攝像頭芯片采用OmniVision公司的CMOS圖像傳感器OV7620.C3188A攝像頭模塊采用數字和模擬信號輸出接口,并提供8/16的數據總線寬度,通過I2C串行通信協議,可以對OV7620內部的寄存器進行編程,如修改曝光率、白平衡、窗口大小、飽和度、色調和圖像輸出格式等。
2.3 電機驅動和電源模塊
驅動部分是機器人的重要組成部分,它和電機組成機器人的執行機構,完成機器人行走運動。直流電機具有良好的線性調速特性、簡單的控制功能、較高的效率、優異的動態特性,被廣泛應用在控制系統中。本系統將采用4片L298N電機驅動芯片驅動8個直流電機,采用PWM調速原理控制直流電機達到控制機器人的速度。
為了消除電機運轉對系統核心開發板SBC2410的干擾,從核心開發板的控制引腳輸出的信號,經過16路光電耦合器(需4片TLP521-4)進行信號隔離,脈寬調制PWM控制光電耦合器的開關,以達到控制L298N驅動芯片的目的,并驅動電機按照所需的速度運轉。
在電源方面,設計的系統電源主要供給核心控制板模塊、電機驅動模塊、人機交互模塊所用的640?鄢480TFT/LCD顯示器、視頻采集模塊、無線收發模塊(預留擴展)和語音采集模塊。系統最終選用12 V的電瓶供電,可直接給電機驅動芯片和LCD顯示器供電。但由于系統模塊多,所需電流大,所以在提供12 V轉5 V電壓時,選擇開關電源芯片LM2576作為電壓變換核心器件,它能承受最大3 A的電流輸出。
3 智能機器人控制系統軟件結構設計
機器人控制系統的實時性好壞對于整個機器人系統的性能極其重要,控制系統的實時性越強,機器人處理異常情況的能力越強。由于μC/OS-Ⅱ是一種源代碼公開、可移植、可固化、可裁剪、占先式的實時多任務操作系統,所以本設計就采用μC/OS-Ⅱ提供多任務支持,再整合人機界面μC/GUI和底層驅動程序及應用程序等構建機器人軟件控制系統,實現對整個機器人的實時控制,完成智能控制任務。








評論