一種引信鑒別延時系統的實現

c出現上升沿時,觸發記憶產生信號d;b和c或非判斷出e;然后e和d與判斷得到信號f;f延時得到信號g。
為探索思路的可行性,在電路設計時考慮了兩種輸入量,一路為A信號(a模擬輸入);另一路為B信號(b開關輸入)。為明確這兩路信號邏輯判斷過程的狀態,作如下約定:信號A輸入大于門限值時為“1”狀態,小于門限值時為“0”狀態;信號B為“1”狀態和“0”狀態。本文引用地址:http://www.104case.com/article/161833.htm
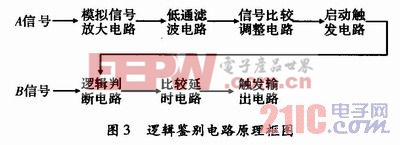
通過上述邏輯關系可以看出,邏輯判斷初始時刻信號A、B處于零狀態;邏輯判斷時刻信號A處于“1”狀態;保持過程信號A、B處于“0”、“1”狀態的并存;但延時動作時,信號A、B都處于穩定的“0”狀態。設計的電路需要在邏輯判斷初始時刻,電路處于等待狀態;信號A動作時,電路開始啟動。在保持過程中,為了識別信號A、B何時處于零狀態,電路始終進行邏輯判斷;當保持完成后,A與B信號均處于“0”狀態并且達到設定時間時,系統開始延時充電并輸出觸發信號;延時功能用RC延時電路來實現。設計電路的原理框圖如圖3所示。
2 電路設計方案
2.1 延時電路
由于延時是采用的RC充放電原理實現的,電路充電時間常數t1取決于電阻電容值的匹配情況。其計算公式為

其中,R1,C1為延時電路的電阻電容;E為輸出觸發信號的工作電壓;Vc為t1時刻的充電電壓,在這里取Vc等于E/2。而在邏輯判斷時和保持過程中,A、B信號狀態為“1”,電容的充電功能均無法實現;即使在保持過程中由于一些特殊原因偶爾出現有A、B信號狀態均為“0”的情況,但都只可能是瞬間行為,不會超過設定的可靠時間常數t1,而且放電時間常數t2t1,C1建立的電荷會很快釋放,以保證系統工作的可靠性。







評論