自校正模糊控制交流電機(jī)轉(zhuǎn)速調(diào)整器的研究與設(shè)計(jì)

本文引用地址:http://www.104case.com/article/161782.htm
(1) 雙向晶閘管開(kāi)關(guān)從截止到完全導(dǎo)通需要一定的時(shí)間(一般在10μs下),所以觸發(fā)脈沖的寬度要在10μs以上,最好為20~50μs。如果是感性負(fù)載,由于電流上升比較慢,實(shí)際上還需要更寬的脈沖寬度。
(2) 觸發(fā)電路要有足夠大的電壓和電流。電壓應(yīng)在4~10V,電流要大于10mA,所以可使用5V的副電源。在雙向晶閘管開(kāi)關(guān)和GP5之間應(yīng)接一個(gè)0.2kΩ的電阻。
(3) 不觸發(fā)時(shí)的電壓應(yīng)小于0.15~0.2V。觸發(fā)脈沖的前沿要盡量陡,應(yīng)在10μs以下。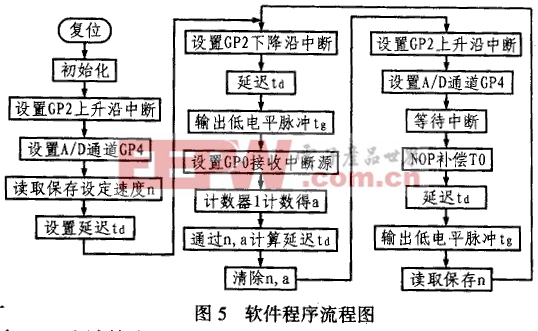
3 軟件的實(shí)現(xiàn)
圖4是該設(shè)計(jì)中轉(zhuǎn)速和檢測(cè)信號(hào)的波形時(shí)序圖,圖5是本設(shè)計(jì)方案的軟件程序流程圖。該程序的主要步驟是復(fù)位、初始化、設(shè)置GP2上升沿中斷、設(shè)置A/D通道GP4、讀取電位器設(shè)定的速度值n(n經(jīng)過(guò)A/D)和讀取Td預(yù)先設(shè)定值等。當(dāng)交流電源變?yōu)樨?fù)半周期時(shí),設(shè)置GP2下降沿觸發(fā)和延遲Td即可輸出寬度為Tg的脈沖,同時(shí)設(shè)置GP0接收中斷源請(qǐng)求等。一般當(dāng)霍爾開(kāi)關(guān)輸入為上升沿時(shí)中斷,計(jì)數(shù)器計(jì)數(shù),而當(dāng)霍爾開(kāi)關(guān)再輸入一個(gè)上升沿中斷時(shí),計(jì)數(shù)器停止,并記下數(shù)值a,最后在通過(guò)比例積分調(diào)節(jié)算法計(jì)算出延遲Td后清除n和a。當(dāng)交流電源變?yōu)檎胫芷跁r(shí),在設(shè)置GP2上升沿觸發(fā)、設(shè)置A/D通道GP4、等待中斷、補(bǔ)償延遲T0、延遲Td以及觸發(fā)脈沖Tg后,便可通過(guò)GP4讀取設(shè)置速度n。設(shè)計(jì)時(shí)正負(fù)周期的程序循環(huán)進(jìn)行。通過(guò)計(jì)數(shù)器的數(shù)值a計(jì)算轉(zhuǎn)速s的算式如下:
s=f/a
其中,f是十六位計(jì)數(shù)器1的頻率,為1MHz。
實(shí)際上,通過(guò)n和a由單片機(jī)計(jì)算延遲td需要一個(gè)準(zhǔn)確的算法。數(shù)字調(diào)節(jié)算法一般選擇PI算法,這是在工業(yè)過(guò)程控制中應(yīng)用最廣泛的一種控制形式。其作用在于能夠集比例調(diào)節(jié)的快速和積分調(diào)節(jié)的清除靜差作用于一體,從而使系統(tǒng)的靜、動(dòng)特性都有所改善。
4 結(jié)論
本文設(shè)計(jì)的簡(jiǎn)單易行的電動(dòng)機(jī)調(diào)速器雖然解決了電動(dòng)機(jī)的運(yùn)行效率問(wèn)題,也比較簡(jiǎn)單實(shí)用。但也有一些需要改進(jìn)的地方,尤其在軟件方面,還需要加強(qiáng)功能,以提高算法的效率和準(zhǔn)確性。








評(píng)論