數字化舞臺布光燈具控制器的設計

由于不需要像Mamdani型那樣計算面積重心,Sugeno型的解模糊算法相對簡單,運算量較小。
Mamdani型和Sugeno型有各自的優勢,Mamdani型的優點為:
· 直觀、符合人的習慣
· 廣泛被接受
Sugeno型的優點為:
· 很高的運算效率
· 可以協同線性控制理論(如PID)
· 可以使用優化和自適應技術
· 可以保證輸出平面的連續性
· 可以進行數學分析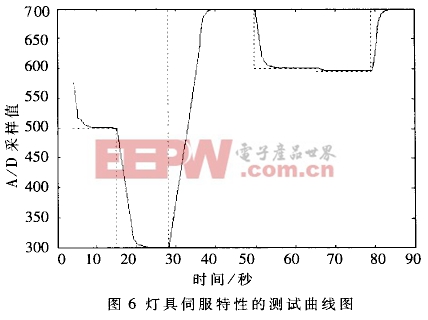
對于本項目,通過在PC機中進行的仿真和實際測試表明,二者的輸出平面和控制效果相近。而Sugeno型運算量少,更適合在單片機中使用。
模糊控制器的輸出為PWM值,采用0階Sugeno模型推理,有五個輸出值:{反向高速,反向中速,停,正向中速,正向高速},由NRun、NWalk、Prone、PWalk、PRun表示,模糊邏輯推理規則見表1。
表1 模糊邏輯揄規則
| PB,5 | PS,4 | Z,3 | NS,2 | NB,1 | |
| P,3 | NRun | NRun | Prone | Prone | PRun |
| Z,2 | NRun | NWalk | Prone | PWalk | PRun |
| N,1 | NRun | Prone | Prone | PRun | PRun |
對于不同的燈具和自由度,NWalk和PWalk的數值是可調參數,從EEPROM中讀取,因此不能使用查表方式編程,而要進行實時運算。為提高速度,在程序中所有的四則運算都是字節型和整型,避免使用浮點量,標準8051內核可以用一個指令完成,最長為4個機器周期。模糊隸屬度值用0~255表示,而不是0~1,在運算最后一步再作歸一化處理。
由于在模糊控制器中缺乏積分環節,使得其無法對較小的殘差作出合理的反應。例如由于電機、機構的靜摩擦力的存在,當殘差較小時,電機無法啟動。因此在控制器的輸出端疊加一個非線性的積分環節,只在殘差e較小、速度v為0的時候起作用,可以再處理這種情況。
圖6是燈具伺服特性的實測曲線(俯仰自由度曲線)虛線表示設定值,實線是實際位置測量值。

伺服電機相關文章:伺服電機工作原理
pid控制器相關文章:pid控制器原理








評論