基于電流間接控制的STATCOM系統仿真研究

3.1 系統模型搭建
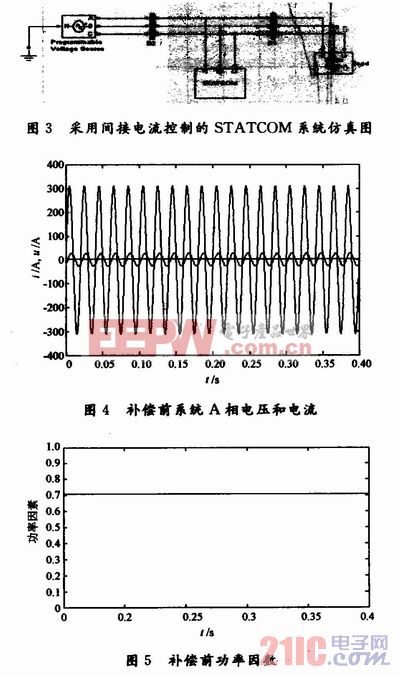
按照圖3所示,在Matlab/Simulink中搭建基于間接電流控制的STATCOM的系統仿真模型。圖中用無窮大系統電壓的有效值為
3.2 仿真結果分析
仿真中,系統負荷為三相平衡負荷,因此可取A相電壓和電流波形作為代表進行觀察。圖4為補償前系統A相電壓電流相位比較圖。在圖中,電壓波形的幅值較電流波形的幅值大,電壓相位超前電流相位90°。圖5為系統補償前的功率因數,其數值保持在0.707,與理論計算值相符合。
圖6為補償后系統A相電壓電流相位比較圖,電壓和電流波形相位已基本趨于一致,因此可以獲得較高的功率因數。
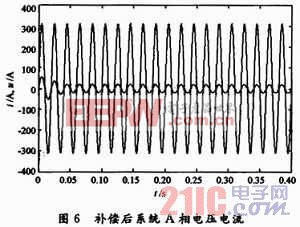
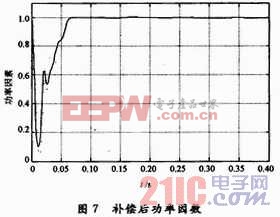
圖7給出的系統補償后功率因數曲線的也證明了這一點。因變流器直流側電容需要進行充電,所以在起始階段功率因數發生振蕩,完成電容充電后振蕩很快消失(在0.06秒附近),之后STATCOM進入穩態工作區,功率因數接近于1。
4 結語
本文對電流間接控制策略進行了分析,實現了基于電流間接控制方法的STATCOM的系統仿真,仿真結果驗證了所建立模型的正確性和有效性。電流間接控制方法的優點在于結構相對簡單,技術也比較成熟,但與電流直接控制方法相比,間接控制方法存在控制精度較低,電流響應速度較慢。應針對其優缺點做進一步研究,根據不同場合合理選擇。

基爾霍夫電流相關文章:基爾霍夫電流定律



評論