淺談無線傳感器網絡的開發方案

2.3 網關節點設計
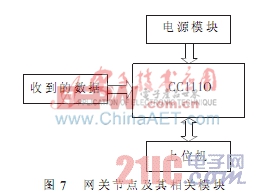
終端節點處理完智能儀表和二次儀表的相關數據之后,通過發送模塊發送數據,網關節點負責接收所有終端節點發過來的數據,再把數據傳送給上位機中,上位機的監控軟件(如組態軟件)對這些數據進行進一步的處理。這里有一個關鍵的問題就是網關節點與上位機的可靠性通信問題。一般使用成熟的現場總線模式來實現網關節點與電腦之間的通信,如Modbus總線協議。網關節點及其相關模塊如圖7所示。
2.3.1 Modbus現場總線協議設計
Modbus 協議是應用于電子控制器上的一種通用語言。通過此協議,控制器相互之間、控制器經由網絡(例如以太網)和其它設備之間可以通信。它已經成為一通用工業標準。有了它,不同廠商生產的控制設備可以連成工業網絡,進行集中監控。此協議定義了一個控制器能認識使用的消息結構,而不管它們是經過何種網絡進行通信的。它描述了一控制器請求訪問其它設備的過程,如何回應來自其它設備的請求,以及怎樣偵測錯誤并記錄。它制定了消息域格局和內容的公共格式。
當在一Modbus網絡上通信時,此協議決定了每個控制器須要知道它們的設備地址,識別按地址發來的消息,決定要產生何種行動。如果需要回應,控制器將生成反饋信息并用Modbus協議發出。在其它網絡上,包含了Modbus協議的消息轉換為在此網絡上使用的幀或包結構。這種轉換也擴展了根據具體的網絡解決節地址、路由路徑及錯誤檢測的方法。
當在一Modbus網絡上通信時,此協議決定了每個控制器需要知道它們的設備地址,識別按地址發來的消息,決定要產生何種行動。在其他網絡上,包含了Modbus協議的消息轉換為在此網絡上使用的幀或包結構。這種轉換也擴展了根據具體的網絡解決節地址、路由路徑及錯誤檢測的方法。
Modbus協議主要分為ASCII和RTU兩種。本文采用RTU的方式,其信息幀格式如表1所示。

當控制器設為在Modbus網絡上以遠程終端單元模式通信時,在消息中的每個8 bit的字節包含2個4 bit的十六進制字符。這種方式的主要優點是:在同樣的波特率下,可比ASCII方式傳送更多的數據。
代碼系統:8位二進制,十六進制數0…9,A…F.
消息中的每個8位域都是由2個十六進制字符組成。
每個字節的位:1個起始位;8個數據位,最小的有效位先發送;1個奇偶校驗位;1個停止位,2個bit;錯誤檢測域;CRC(循環冗長檢測)。
2.3.2 組態軟件設計
組態軟件是指一些數據采集與過程控制的專用軟件,它們是在自動控制系統監控層一級的軟件平臺和開發環境,使用靈活的組態方式,為用戶提供快速構建工業自動控制系統監控功能的、通用層次的軟件工具。
三維力控組態軟件是國產監控組態軟件唯一的完整的冗余與熱備體系設計,完整的分布式網絡結構;支持控制設備冗余、多重網絡冗余,多客戶端冗余、冗余的主從站都可以操作;人機監控圖形界面與過程數據處理分離,內置獨立的實時歷史數據庫。
方便、靈活的開發環境,提供各種工程、畫面模板、可嵌入各種格式的圖片,方便畫面制作,大大降低了組態開發的工作量。
高性能實時、歷史數據庫,快速訪問接口在數據庫4萬點數據負荷時,訪問吞吐量可達到20 000次/s.
強大的分布式報警、事件處理能力,支持報警、事件網絡數據斷線存儲,恢復功能;支持操作圖元對象的多個圖層,通過腳本可靈活控制各圖層的顯示與隱藏;強大的ACTIVEX控件對象容器,定義了全新的容器接口集,增加了通過腳本對容器對象的直接操作功能,通過腳本可調用對象的方法、屬性。
全新的、靈活的報表設計工具提供豐富的報表操作函數集、支持復雜腳本控制,包括:腳本調用和事件腳本,可以提供報表設計器,可以設計多套報表模板。
支持控制設備冗余、控制網絡冗余、監控服務器冗余、監控網絡冗余、監控客戶端冗余等多種系統冗余方式。全新的高性能實時、歷史數據庫。
3 實驗結果
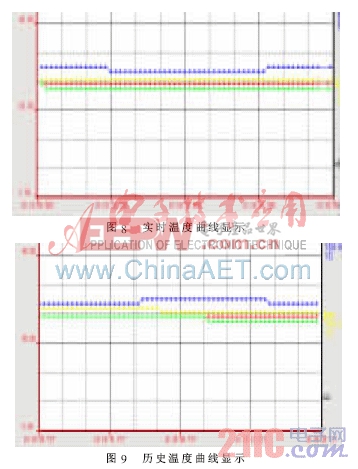
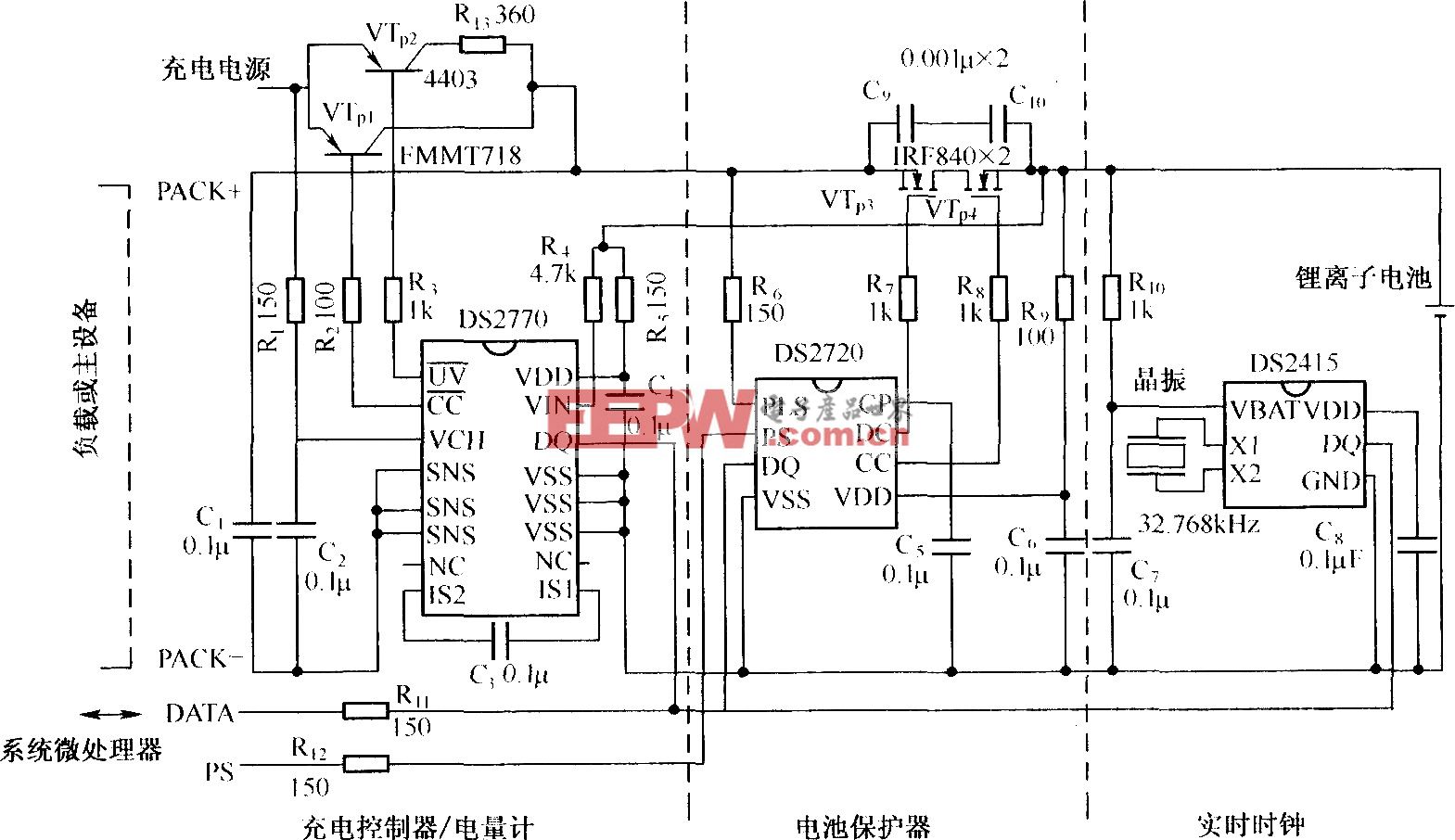
以溫度監測系統為例,本文采用上面提到的方案開發了一套如圖1所示工業用的無線傳感器網絡,其實驗結果如圖8和圖9所示。
本文重點介紹了工業無線傳感器網絡部分的實現。在已經實現工業無線傳感器網絡和節點間雙向通信的前提下,很容易實現對工業設備的無線控制控制,包括繼電器、I/O、開關控制、電機控制,只需要在軟件和硬件上進行一些小的擴展就可以了。












評論