智能跟蹤控制系統的動畫仿真設計

在對跟蹤控制問題的研究過程中,為了改進智能體模型或者控制器性能,需要詳細觀察智能體某個階段的運動軌跡形態。為了達到此要求,設計開發過程控制模塊,實現對仿真過程的實時控制。該模塊主要設計了兩種鍵盤控制功能,即速度調整和視點調整。
速度調整是在創建系統形體的間隙設置額外的延遲時間來調控仿真速度。設計在f1~f6按鍵響應程序中分別設置六個檔次的速度。
視點調整是設計用幾何變換法來改變視點的位置。該方法的設計原理如圖7所示。
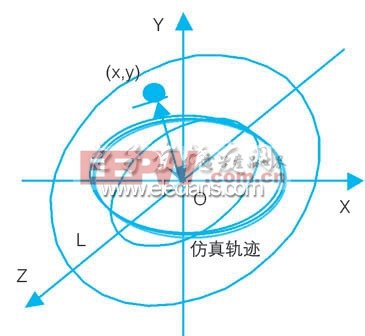
圖7 幾何變換設計原理圖
圖7中,o為軌跡中心;ρ為由o指向視點的矢量;視點坐標(x,y)為矢量ρ分別在x軸和y軸上的投影值;圓環面l為xoy平面上的視點調整區域,由ρ的模最大值和最小值來界定;上、下方向鍵分別用于調整ρ變大、變小;左、右方向鍵用于調整視點在l內以o為圓心ρ為半徑的圓環上分別向左、向右移動。基于該幾何變換法的設計,在仿真運行過程中,通過控制模塊向軟件發出指令,就能夠實現視點360°全方位移動和觀察距離的調整。圖8為經過視點調整后看到的仿真圖像。

圖8 軌跡交接放大圖
從圖8中能夠觀察到各條跟蹤軌跡接近目標軌跡前的形態以及接近的位置,進而判斷各系統模型或跟蹤控制器的優劣,為改進它們的參數提供了實驗依據。
5 結束語
本文根據智能跟蹤控制系統研究的需要,開發出三維動畫仿真軟件。該軟件具有以下突出優點:采用數據導入的思想,使軟件擺脫數據來源復雜的限制,拓寬了該仿真軟件的使用范圍;設計視點幾何變換法等,實現仿真過程的實時可操作特性,從而提高了其作為仿真研究的價值;采用模塊化設計,結構緊湊合理,可重用性和擴展性較強。








評論