高精度超聲倒車雷達的設計

3.2 扇形掃描探測的優點
首先,系統使用小波束角超聲傳感器進行測距,測距的指向性更加優越;并且,由于系統選用的傳感器的有效掃描角度為10°(5°×2,波束角內的范圍),而步進電機每一次只轉動7.2°的角度,所以探測范圍內的每一個區域都會被重復探測,不會出現障礙物被遺漏的情況,消除了探測盲區的存在。
此外,由于系統只使用了一套單獨的超聲測距系統,所以在進行測距工作時不存在傳感器之間相互干擾的問題,系統性能更加穩定,結果也更加可靠。
3.3 扇形掃描探測方法的效果
扇形掃描的探測方法將所需探測的區域劃分成一定數量的較小區域逐個探測。這樣的方法極大地提高了掃描的準確度,不僅獲得了障礙物的距離信息,也獲得了較為準確的方向信息。以泊車過程中通常會遇到的方形、圓形、尖角這類障礙物為例,在不同距離上,掃描效果如圖4所示。
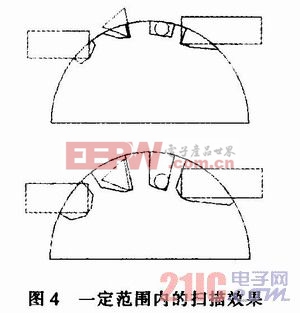
雖然探測結果相較于障礙物的實際情況仍有較大差別,但已經比較確切地反映了障礙物的實際分布情況。依據這樣的探測結果,可以為駕駛員提供更加直觀明確的參考信息,極大地提高了泊車的安全性。
3.4 時效性分析
使用扇形掃描的探測方法,需要在21個不同的方向上逐個進行距離探測,相比于以往的設計來說,這樣的探測方法耗費的時間要長很多。但是對于倒車雷達系統來說,由于泊車時的探測距離不會超過3 m,進行21次測距所需的時間也在幾秒鐘之內,并且倒車時的車速很慢,所以不會影響正常的倒車行駛。
4 結論
在倒車雷達的設計中使用扇形掃描的探測方法,不僅能夠更加準確地探知環境中存在的障礙物的具體方位,更真實確切地反映泊車環境的實際情況,而且消除了以往設計中普遍存在的探測盲區。實驗證明,其探測的準確度至少是傳統倒車雷達的6倍以上。這樣的設計能夠給駕駛員提供更加直觀可靠的參考信息,極大地提高了泊車的安全性。








評論