高精度超聲倒車雷達的設計

摘要:為解決超聲倒車雷達指向性不足和存在探測盲區的缺點,設計使用步進電動機驅動小波束角超聲傳感器做扇形掃描探測的辦法。設計中使用步距角為7.2°的步進電動機驅動波束角為5°的超聲傳感器在每一個步進角度上進行測距。結合測距的角度和測得的距離就可得到準確的障礙物位置信息。并且,由于傳感器的有效探測角度大于電機的步進角度,所以每一次測距的探測范圍會相互交疊,消除了探測盲區的存在。實驗證明,使用步進電機驅動超聲傳感器進行探測,其準確度為傳統倒車雷達的6倍以上。
關鍵詞:超聲波測距;倒車雷達;探測盲區;步進電機;扇形掃描
倒車雷達,又稱為泊車輔助系統,是車輛泊車時的安全輔助裝置。倒車雷達系統能夠在泊車時以聲音、指示圖形或視頻影像等方式向駕駛員反映車輛后方的環境狀況,解除視覺死角中的潛在威脅,提高車輛停泊的安全性。目前倒車雷達的應用十分廣泛,絕大多數車輛都已經將倒車雷達作為必不可少的標準配件。
目前的倒車雷達系統大多采用超聲波測距原理:通過超聲波測距裝置測取車輛后方的障礙物距離,以此為依據來判斷泊車環境。超聲波測距具有能量消耗緩慢、傳播距離遠的優點,且不易受光線、煙霧、電磁等干擾的影響,可以在各類天氣下使用;并且利用超聲波測距原理簡單、易于實現,成本低廉、可靠性也好,因而廣泛應用于各類倒車雷達中。但是由于超聲波測距系統自身的原因,以往的倒車雷達只能夠模糊地判斷障礙物的大致位置,并不能準確地指示泊車的環境狀況,而且總會存在一定的探測盲區。因此,設計無盲區的高精度倒車雷達具有較高的應用價值。
1 超聲波測距的特性
1.1 超聲波測距的原理
超聲波測距,是依靠超聲傳感器向外發射超聲波,然后接收超聲波遇到障礙物后反射回來的回波,依據發射和接收的時間間隔t以及聲波的傳播速度v,來計算傳感器和障礙物之間的距離S。即

式(1)中v為聲波傳播速度。在空氣介質中,聲波的傳播速度會受到溫度、濕度、氣壓等因素的影響,其中溫度對聲波速度的影響最大,其補償關系為:
![]()
由此可知,超聲波測距中,聲波的傳播速度和聲波發射與接收的時間間隔是判斷距離的兩個依據。如果測距環境的溫度變化不大,或者系統對測距結果不要求有很高的精度,就可以忽略溫度對聲波傳播速度的影響,以v=340m/s的恒定值作為聲波傳播的速度,在這樣的情況下,回波時間的長短就成為測距的唯一依據。
在超聲倒車雷達的設計中,由于系統的探測精度只要達到厘米級,所以一般不需考慮溫度補償,而只根據回波時間來判斷所測距離。
1.2 超聲波測距指向性的不足
超聲波測距裝置的核心部件是超聲傳感器,超聲傳感器是發射和接收超聲波的裝置。傳感器在發射超聲波時,能量并不是均勻分布的,而是存在波束角的概念。
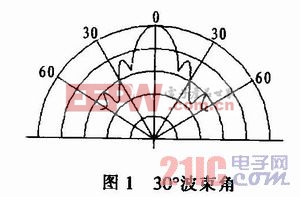
超聲傳感器在發射超聲波時,沿傳感器中軸線的延長線(垂直于傳感器表面)方向上的超聲射線能量最強,而其他方向上的聲波能量逐漸減弱。以傳感器中軸線的延長線為軸線,由此向外,至發射能量減少至半數(-3 dB)處,這個夾角被稱為超聲傳感器的波束角,如圖1所示。








評論