基于MSP430的自動避讓小車的設計與實現

彎道矯正原理圖如圖6所示,通過轉彎標志線進行自我定位,在轉彎過程中進行方向矯正。本文引用地址:http://www.104case.com/article/160740.htm
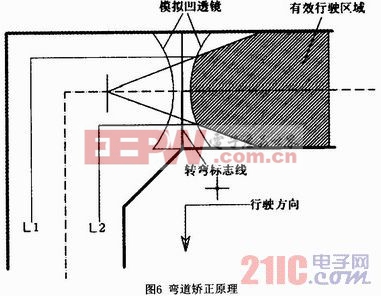
通過軟件實現模擬凹透鏡散射原理,將不平行于行駛軸線方向的小車進行矯正,圖中在有效行駛區域內部的小車都能矯正到直線L1與直線L2之間,理論上與軸線平行。經過實驗得出,該方案對偏轉角度在正負30°以內的小車矯正效果較為明顯。在直線行駛區域內,通過邊界線的反饋保證小車不超出邊界且在有效行駛區域內進入彎道。
5 測試方法及測試結果
5.1 測試儀器
秒表、卷尺
5.2 測試環境和方法
實驗室、單個任務多次測量

5.3 測試結果分析
經過現場測試,甲乙兩車速度特性基本一致,交替領跑有速度加快的趨勢,系統在交替領跑過程中趨于穩定,并未放大誤差。
6 結論
本系統從方案制定,到系統硬件搭建以及算法的采用上都進行了精心設計和論證。測試結果表明自動避讓小車控制系統反映速度快、運行穩定,避讓及時。















評論