基于MSP430的自動避讓小車的設(shè)計與實現(xiàn)

3.2 電機(jī)驅(qū)動模塊電路
L298的12個H橋下側(cè)橋晶體管的發(fā)射極連在一起,之后通過控制IN1、IN2,當(dāng)IN1高電平,IN2低電平,使能端ENA輸入PWM波時電機(jī)正轉(zhuǎn),反之電機(jī)反轉(zhuǎn),通過改變PWM占空比改變轉(zhuǎn)速。L298構(gòu)成的電機(jī)驅(qū)動電路如圖2所示。本文引用地址:http://www.104case.com/article/160740.htm
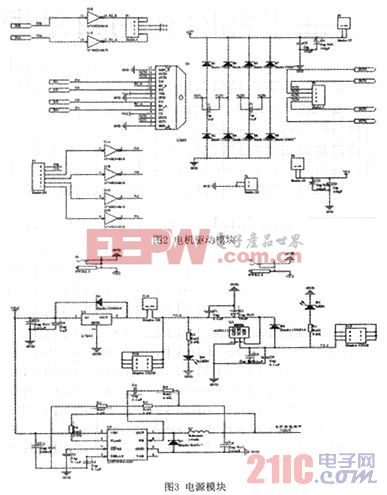
3.3 電源模塊
整個系統(tǒng)由一個左右的6800mAh/12.8V的鋰電池供電,主要分為兩個分支往下一級模塊供電,一路是經(jīng)過L7805穩(wěn)壓到5V給電機(jī)驅(qū)動模塊L298N的輸入級供電。再經(jīng)過lm1117穩(wěn)壓為3.3V給MSP430最小系統(tǒng)、紅外循跡、nRF無線模塊供電。另外一路則通過由LM2598組成電壓可調(diào)DC-DC模塊給L298N的輸出級供電來驅(qū)動電機(jī),如圖3所示。
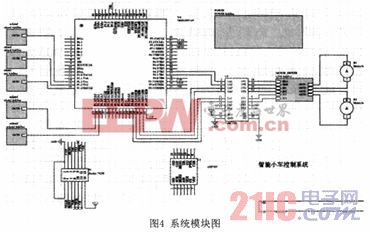
3.4 系統(tǒng)控制示意圖
4 軟件設(shè)計
傳感器安裝如圖5所示,安放在小車頭部,該尺寸設(shè)計是經(jīng)過大量的實驗與計算總結(jié)得出的。內(nèi)側(cè)的兩個傳感器與中間的間距9cm,正好小于超車道區(qū)域的虛線,便于識別超車區(qū)外側(cè)的兩個傳感器與內(nèi)側(cè)的間距5cm,該距離便于邊界線的檢測。
















評論