光纖光柵傳感器的系統方案解析

為了實現高精度的數據采樣,本系統選用美國AD公司推出的一種12位帶并行微機接口的逐次逼近型模/數轉換芯片AD1674來實現系統的模數轉換,AD1674內部自帶采樣保持器(SHA)、10V基準電壓源、時鐘源以及可和微處理器總線直接接口的暫存/三態輸出緩沖器。
本系統采用TMS320VC5402作為主控芯片。這種定點DSP芯片可實現光纖光柵傳感信號的處理、步進電機的控制和顯示等。該芯片具有強大的數據運算和處理功能,利用其RPT和MAC指令可以在單指令周期內實現乘累加運算。其靈活的循環緩沖區和高效的C語言可使TMS320VC5402方便地實現數據的循環尋址與卷積運算,從而實現高速度解調。
2.2 系統軟件設計
DSP系統的軟件部分主要由初始化程序、線性插值子程序或者曲線擬合子程序、顯示程序、驅動程序、中斷服務程序等幾部分組成,可以將A/D轉換和串行通訊代碼放在中斷服務程序中來實現。
初始化程序用于完成DSPI/O口、內部A/D轉換器、串行口、中斷等資源的初始化。為了協調A/D轉換和步進電機的控制,可由DSP發出控制信號來控制步進電機,以使經過A/D轉換所得的數字信號與加在匹配光柵上的步數一一對應。顯示部分的程序可將此數字信號經代數變換轉換為直接表示應力的數字量,然后通過查表動態實現應力顯示。
當匹配光柵反射波長與光纖光柵反射波的中心波長重疊時,光電轉換輸出脈沖信號,并向DSP請求中斷,然后由DSP執行中斷服務程序,以將DSP內部A/D轉換器轉換所得的數字量讀入DSP并保存起來,最后通過串行口發送到上位機再中斷返回。
3 實驗結果分析
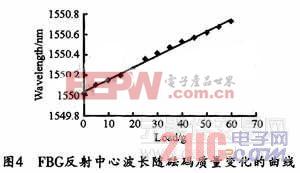
由實驗可得,在砝碼質量從0 g增加到60 g的過程中,粘貼在懸臂梁上的FBG1中心波長漂移0.716 nm,圖4所示為FBG1中心波長隨砝碼質量變化的曲線圖。由圖4可知,懸臂梁上的FBG中心波長變化量與懸臂梁自由端所施加的砝碼質量成較好的線性關系,并且具有較高的靈敏度。
實驗中可通過增加砝碼的質量施加對懸臂梁不斷增加的拉伸應力。兩個匹配光柵反射光信號分別被各自對應的光電探測器所接收。光電探測器輸出的模擬電壓信號則由以DSP為核心的信號處理系統的一系列處理得出傳感光纖布拉格光柵所感測到的外界物理量的大小。

干涉儀相關文章:干涉儀原理
光纖傳感器相關文章:光纖傳感器原理









評論