船載中小型信息監控終端的設計與實現

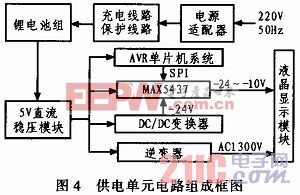
2.4 供電單元電路
供電單元在船電正常時采用交流220 V供電,并自動實現充電,充滿電后自動斷電;在船電故障時采用鋰電池組供電,供電單元電路組成框圖如圖4所示。外部交流220 V電源通過適配器轉化為14.8 V左右的直流,通過充電線路為鋰電池組進行充電,保護線路用于防止過充、過放、過流和短路,然后經過穩壓模塊輸出兩路直流5 V,供給AVR單片機系統。由于LCD背光顯示需要的特殊電源,因此通過冷陰極背光電源逆變器將直流5 V變換成交流1 300V供給LCD背光燈管。MAX5437是128級、高電壓的數字電位器,采用簡單的SPI接口代替機械調節,將DC/DC輸出的-24 V電源變換為-10~24 V范圍內可調,從而為液晶顯示模塊提供負電源和對比度調整電壓。本文引用地址:http://www.104case.com/article/160511.htm
3 軟件設計
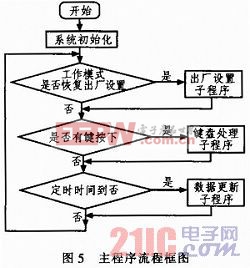
系統軟件設計采用AVR Studio+Winavr集成開發平臺。AVR Studio是在Windows操作系統下編寫和調試AVR應用程序的嵌入式開發環境(IDE),Winavr是免費的AVR開發程序集,AVR Studio配合Winavr能夠支持AVR C/C++程序的編輯、編譯、連接以及生成目標代碼,同時利用Atmel公司設計的實時在片仿真器JTAGICE mkⅡ能夠實現系統的在線硬件仿真調試功能和目標代碼的下載功能。為了方便程序調試和提高可靠性,軟件設計采用自頂向下,逐步求精的結構化、模塊化設計方法。終端主程序流程圖如圖5所示,上電后首先進行系統初始化設置,然后查詢鍵盤狀態,如果有鍵按下立即進行按鍵處理,否則按照設定的工作模式自動進行數據接收、顯示和定時更新。在進行具體程序編寫的時候,還需注意以下幾個方面:
1)進行系統初始化的時候,需要完成對單片機I/O端口、SPI端口、異步串行端口、CAN端口等的初始化,同時還要禁止不使用的單片機功能模塊,如JTAG端口、TWI端口等以降低整機功耗。
2)初始化完成后,還要對MAX5437的滑片位置進行設置。
由于其內部沒有EEPROM,所以軟件中利用單片機的EEPROM來記錄滑片的位置信息。考慮到用戶可能將液晶對比度調飛,程序中設計了通過鍵盤操作恢復出廠設置的功能。
3)采用中斷和查詢相結合的方式響應鍵盤。由于鍵盤行線同時連接單片機中斷,程序不必一直查詢鍵盤狀態,只是中斷產生以后才去掃描鍵盤,從而提高了單片機工作效率。
4 結束語
本文以AT90CAN128為核心,利用其豐富的片上資源,搭接必要的外圍電路,軟件設計與硬件電路緊密結合,提供了一種低成本高可靠性的船載中小型信息監控終端的設計方案。該終端顯示清晰、工作穩定,可操控性強,具有較高的性價比和廣泛的實用性,以及極好的推廣應用價值。






評論