短波發射機智能控制系統的設計與實現

2.3 數據采集部分
數據采集處理是一個進程,它包括主線程和輔線程。主線程完成當前發射機狀態信息的讀取、寫入、實時顯示及查詢;輔線程實現一個時鐘以提供用戶當前時間,并定時對發射機上運行時間頻率進行檢測和動態顯示,在情況不對時發出警告。另外應用程序還可以將該信息(包括機號、機器狀態、當前數據頻率及當前時間)通過OLED顯示屏提供給用戶,并寫入一個文件進行記錄。如果有需要的話,文件傳輸進程會將該文件傳輸到上位機。上面中心就能通過串口和上位機進行通信從而得到實時信息。該模塊能夠提供給機房實時的發射機運行參數:如頻率、調幅度、播出功率、聲效監聽等。
目前短波發射機已經運用的是PM511P。PM511P足一塊PC104總線的多功能數據采集板,適用于工業現場、實驗室、嵌入式設備等多種場合,具有16路A/D轉換通道、4路D/A通道、24路可編程開關量輸入輸出、3路計數通道,其AD頻率為100kHz,輸出精度為12b。
2.4 自動保護與監測部分
在這里采用的是Xilinx公司的XCS-40控制邏輯芯片,該芯片具有過荷保護的全部邏輯功能,有對過荷動作信號指示及鎖存功能,還具備與微機系統連接的現場總線功能。當機器出現過荷現象時首先就由該控制部分拉斷發射機的高頻,將其封鎖住對發射機進行保護,其次通過外部接口將信息傳到外部,這樣可對外部工作人員進行報警,達到監測的目的。
該外部通信口采用100M網卡通過機房多機系統的局域網將電控系統與監控系統以及網絡服務器連接起來,從而實現電控系統的遙控與監測。而內部的通信則是通過RS 232串行口連接實現的。
3 智能終端軟件系統的設計
首先介紹程序響應的中斷系統。由于單片機與模塊之間的通信是不定期、不定長的,為了保證不出現阻塞情況,系統采用中斷接收方式:把接收到的所有數據在中斷過程中放入對應的循環緩沖區之中,然后由主程序解析接收到的串口數據。單片機還要響應另外兩個中斷:一個是報警按鈕被按下時觸發的中斷;另一個是定時中斷,它每20 ms觸發一次,用于檢測模塊的超時應答。智能終端軟件系統的主要功能是由主程序完成的。主程序采用狀態機的系統結構,其總體結構圖如圖3所示。本文引用地址:http://www.104case.com/article/160347.htm
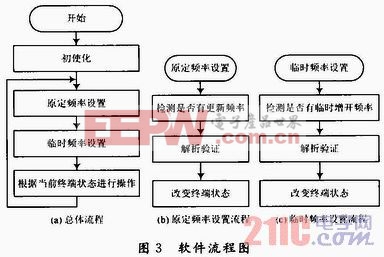
圖3(a)為總體流程框圖,圖3(b)為原定頻率設置流程圖,圖3(c)為臨時頻率設置流程圖。終端可以處于6種狀態:空閑、上傳開機頻率信息、定時上傳開機頻率信息、實時上傳狀態信息、報警、保護。狀態間的切換主要由機房控制中心通過計算機的命令進行控制。先進行初始化工作,然后進入主控制循環。在主控制循環中首先檢查原定頻率設置區中是否有更新的頻率數據包,如果有則進行解析、驗證,并根據協議中的控制命令改變終端所處的狀態(注:其優先權后于臨時頻率設置區)。接著判斷臨時頻率設置區是否有臨時的頻率數據包,如果有則進行解析、驗證,最后根據終端所處的狀態對終端進行操作。
4 結語
該智能系統已運用于短波發射機中,主要是控制部分的運用,但中心化集中控制還沒徹底運用上,一方面是一些遠程檢測部分受發射機干擾比較嚴重,影響數據的實時傳輸;另一方面是技術上還存在或多或少的紕漏,但相對于原始的控制系統來說,這個自動化程度是徹底的提高,未來更有進一步的運用價值。







評論