基于GPS15xL-W塔鐘控制系統的研究

由于步進電機需220 V交流電帶動,停電時步進電機不能工作,塔鐘不再走時,因此,系統中引入高性能、低功耗、帶RAM的實時時鐘。電路當檢測到即將停電時(由電源監視及檢測電路實現),CPU首先將當前時間寫入DS1302提供的RAM中,然后CPU內部所有功能部件都停止工作,僅DS1302芯片由電池供電繼續走時。上電后,CPU從DS1302中讀取時間數據,計算出塔鐘停走的時間,輸出步進電機控制信號,從而控制步進電機帶動塔鐘指針走動,實現系統的自動追時功能。
同時,根據要求,MCU可對塔鐘上的相關設備:霓虹燈、語音芯片(ISD4004)、擴音器等進行控制。另外,通過按鍵,可設置塔鐘的走時基準點。塔鐘的時間數據可通過LCD顯示。
2.2 步進電機驅動電路
2M2260是一款等角度恒力矩細分型步進電機驅動器。該驅動器內部采用類似伺服控制原理的電路,此電路可以使電機低速運行穩定,幾乎沒有震動和噪音,由于驅動器工作電壓高,使電機在高速時力矩大大高于其它二相、五相混合式及傳統式步進電機。步進脈沖停止超過100 m/s,驅動電流自動減半。定位精度最高可達12800步/轉。圖2為單片機與2M2260的連接圖。單片機I/O口與步進電機驅動器之間通過MC1413連接,可增大單片機輸出的驅動電流。本文引用地址:http://www.104case.com/article/160335.htm
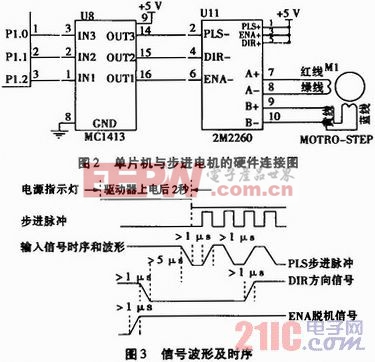
圖3為2M2260的信號波形及時序。驅動器上電后兩秒給步進電機發送脈沖。驅動器對步進脈沖要求是低電平為0~0.5 V,高電平為4~5 V,脈沖寬度大于2.5 μs。ENA-接電源地時,驅動器正常工作,否則,驅動器停止工作,電機處于自由狀態。電機正常工作時,若DIR-輸入為低電平,電機沿順時針方向轉,反之,電機沿逆時針方向轉動。














評論